Introduction
Until helicopter like designs started to come out of Igor Sikorsky and in the mid to late 1930s, autogyros were the only method of heavier than air flight that directed thrust any direction other than along the length of the flying machine.
When war came to Europe, German aviation was quite incredible. Helicopters, rocket aircraft, jet aircraft, even other vertical lift machines were on the drawing boards. Very few of these aircraft ever took to the air or were even built, however, German aeronautical engineers were really ahead of the curve when it came to aeronautics, to the point where the first ‘practical’ helicopter was German as well as some of the first designs for a ‘Tiltrotor’
After the end of the war, the conventional helicopter, Sikorsky’s R4 and Bell’s Model 47 had already started to prove themselves and were getting improved with each successive year. They were slow and inefficient however and were only good for short hops. Sikorsky was asked a series of questions about this time, “When will the helicopter fly faster than the aeroplane, do you know that?”
Sikorsky replied: “Yes, I know that, the answer is never”
- “When will the helicopter be more efficient than the aeroplane, do you know that?”
- “Yes, I know the answer to that too, the answer is never”
He went onto explain that despite these shortcomings, the helicopter had vertical flight capability that made it far more versatile than an aeroplane… Clearly people were already recognising the biggest fundamental problems with conventional rotorcraft.
Post war Britain was an amazing hive of activity. The Fairy Aviation company took the classic 1920s design work for Gyrocopters, thrashed it out and flew a unique aircraft, the FB1 Gyrodyne in 1945.
This progressed into the much larger and more famous Fairy Rotodyne which flew in 1957. The Gyrodyne and Rotodyne brought Spaniard Juan de la Cierva’s basic autogyro design up to modern specs however they were in essence, still gyrocopters. The Rotodyne was an ambitious attempt to develop a commuter aircraft out of the concept.
In order to make it a truly vertical lift aircraft though tip jets were added to the blades for takeoff and landing meaning that the aircraft didn’t have to be moving forward for the disc to be generating lift as a Gyrocopter does. The concept stunned the aeronautical world with its vertical takeoff and landing capability and it’s airliner like performance and comfort. There was however, one small problem… The tip jets made the aircraft so noisy that it couldn’t possibly be used as a serious commuter out of cities.

Fairy Rotodyne
Meanwhile in America, the ‘Tiltrotor’ concept was in the minds of people, probably inspired by the work of Focke-Achgelis during the second world war. Platt-LePage’s PL16 was one of the first designs to emerge out of the US however, due to lack of funding, the company closed in 1947. Transcendental’s ‘Model 1’ and ‘Model 2’ both flew for short periods in the 1950s however after the Model 1 crashed, the Model 2 was dropped in favour of the more substantial Bell XV-3.

Bell XV-3
The Bell XV-3 flew 250 times between 1955 and 1966 and proved the tilt rotor concept by transitioning from vertical to horizontal flight 110 times. The aircraft was not without it’s problems however. The first prototype was destroyed when severe vibrations during transition caused the pilot to black out. The second prototype was severely damaged in 1966 when a pylon failed during a wind tunnel test. The XV-3 not only demonstrated the concept but also the problems that were facing designers of tiltrotor aircraft.
Drawing on experience on the XV-3 project, Boeing and Bell teamed up in 1971 to produce the XV-15. Although bearing similarities to earlier designs, this new aircraft defined what we now know as the modern tiltrotor. In 1977, the first prototype flew a limited series of test flights before being transferred to NASA Ames Research Centre for wind tunnel testing. It was subsequently moved to Dryden at Edwards Air Force Base in California for a full flight testing regime. The XV-15 fully proved the concept and despite the first prototype being lost in an accident in 1992, the second prototype flew until 2003 supporting the much larger V22 and AB609, programs.

XV-15
Surely the most well known of the tiltrotor aircraft is the V22 Osprey. Developed directly from the XV-15 for the US military, the Osprey first flew in 1989 and has suffered from a very long and painful gestation period. There have been a number of high-profile accidents caused by pilot error, mechanical failure and software errors leading many to believe that the aircraft is dangerous or poorly designed.
In reality, the problems are relatively normal for the first production tiltrotor. Although the process has been hampered by the need for the aircraft to fold down to fit on ships and other specific military requirements that by in large wouldn’t exist if the aircraft was being developed for the civilian market, the Osprey remains a very effective tool for the US military.
The AW609
In 1996, Boeing and Bell teamed up to develop a civilian mid-sized tilt rotor drawing on experience from the XV-15. The aircraft was aimed at the offshore oil and gas market, which at the time was booming. Boeing pulled out of the project early on and Italian manufacturer Agusta stepped in.
The product of this union was the BA609. 2003 saw the first flight of the prototype and in 2009 Bell also wanted out, seeing the market for such an aircraft diminishing. Agusta Westland were authorised to buy Bell’s share of the project and the aircraft became the AW609.
The 609 is powered by a pair of Pratt & Whitney Canada PT6C-67As delivering 1900shp each although the aircraft is capable of OEI flight. Top speed according to Leonardo (new name for AW) is 275kts and up to a ceiling of 25000ft and a payload quoted at 2860kg (6300lbs).

AW609
Once again, the program has not been without its problems. In 2015, the second prototype aircraft, N609AG encountered a dutch roll situation in high speed flight near the company’s facility in Italy. It was determined that the high speed dive and a new tail design exaggerated some holes in the computer software allowing a dutch roll to develop up to 10.5 degrees at 295kts. The blades of one prop struck the leading edge of the wing and the aircraft broke up, killing both test pilots.
Despite this accident, development of the 609 has continued with a third and fourth prototypes and the company believes that certification and production is imminent. In addition, there are plans to build a larger version.
Pizzagalli.ch’s AW609

This sim version comes from Swiss developer pizzagalli.ch, who, I have to admit, I’d never heard of before. It seems he (they) have been building a number of military fast jets since about 2015. Not the sort of thing that would appear on my radar personally.
I have never flown a tiltrotor in real life and I’m not likely to... I don’t think that I’ve even seen one in real life, so this review has been quite hard for me to write. The developer certainly bit off a big chunk trying to build something that isn’t in production yet and has very little in the way of technical information.
Download and Installation
This addon is not available at x-plane.org. You have to go onto the designer’s own page within the forums here to get the link to their own webstore. Not really the best way for people to find your product in my opinion.
In fact, google searching ‘x-plane AW609’ only brings up the developer’s forum page, not the store. Once purchased, the download size is 73mb so not very big at all. As with most XP products, simply dropping the addon folder into the aircraft folder within the XP directory does the trick. Because it’s not a helicopter and not an aeroplane, you should assign an axis on your controls to the ‘Thrust Vector’ option within the sim.
In the ideal world you need either two throttles (like the X56) or some other form of slider or rotary control. This is simply the way the real thing is too however, as I’ll discuss later, there should be the need for three such controls.
Within the sim, you get three different variants (cargo, passenger and VIP) with nine liveries for each including the factory scheme to Bristow and the US Coast Guard. My only criticism within the sim is that you can’t tell immediately which model is which unless you look at the naming of the ACF file.
Model and Textures
On first glance the exterior of the model looks pretty good. I have to admit that there’s something quite exciting about looking at the bird on the ramp. It looks sleek, futuristic and fast. Like an Italian sports car, it just looks cool.


I just hope that it doesn’t share reliability traits with an Italian sports car…. Everything appears to be modelled where it should be including little things like the vortex generators on the wings, all of the little probes and antennae and the little engine nacelle details.
You will notice that at the bottom of the screenshots, there is a took bar with six buttons, three of which, will be discussed later. ‘D-L Off’ ‘DR-Off’ and ‘BigD Off’ are in fact the door controls.
One small door each side and a big sliding door on the port side of the fuselage. This is intended on the real aircraft to be used for cargo or in some designs, winch operations. While the wording is a little odd, the doors open and close fine with two exceptions.
The first is the port access door has no steps on it. I’m pretty sure that being hinged at the bottom, it should have steps. The other is with the port access door open, the big sliding door shouldn’t be opened as it is designed to slide over the smaller door. On the model, opening the sliding door causes the small door to close but not in time and the sliding one clips straight through it. A little unfortunate.

A strange thing happens when moving the controls on the ground. No power supplied to the system all of the aerodynamic controls move (I’m pretty sure that they’re hydraulic so they shouldn’t move without pressure in the system), but it also causes the machine to buck all over the place. That’s no wind, no engines running.
The texturing on the fuselage is functional but not extremely detailed. The ‘default’ livery seems a bit flat, not in terms of reflections, those are actually quite nice, but it just doesn’t look totally realistic. The other schemes look much better; the Bristow and Era ones actually look really sharp. Maybe the grey scheme is just boring.






There are some things worth pointing out on the texturing though. The exposed mechanism on the nacelles and wing ends isn’t really high quality although it’s OK. However, it suffers from clipping when the viewpoint is moved around.
Worth mentioning is a strange texture issue that occurs on the ‘grill’ next to the exhaust on each nacelle. Depending on where one is viewing it from appear to either go transparent or at least reflect a hell of a lot… or the panel disappears completely.


Moving inside, there are three different cabins modelled as I said before. Cargo, Passenger and VIP. As the photos show below, the passenger config would pose problems for people getting into and out of the aircraft and the VIP fit bears little resemblance to Leonardo’s own mock-ups although given that the aircraft isn’t in production yet, it’s not really surprising.
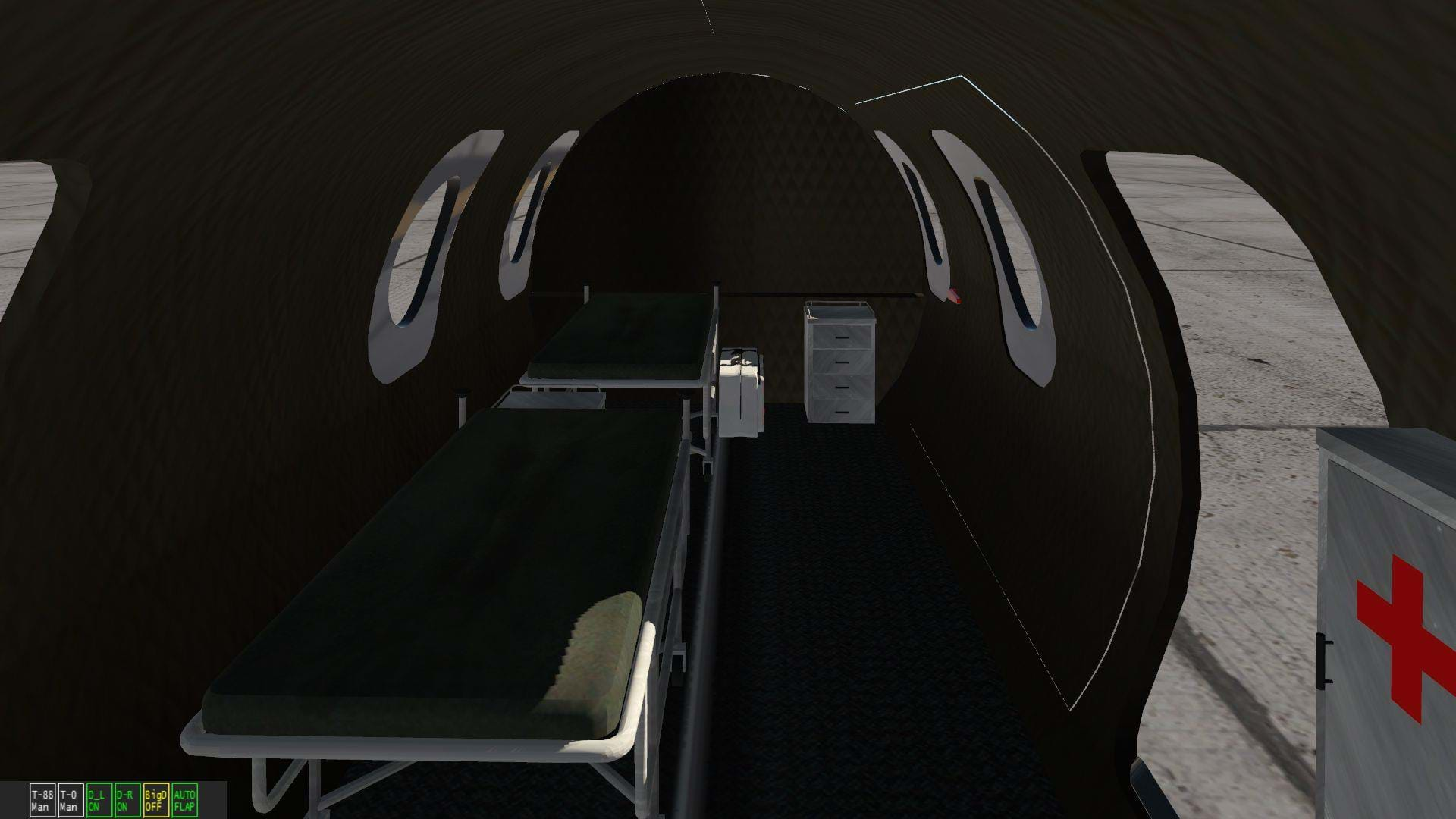


Unfortunately, viewing the interior reveals some big weaknesses with the model. There are gaps in the fuselage, gaps that you can see daylight through. Not just where the doors are but all around the front of the fuselage. They aren’t visible from the outside so it’s just the internal model but it’s not a good look for a pressurised aircraft,


Given that the aircraft has yet to enter service, some liberties obviously had to be taken with the cockpit layout. Both the Wilco version released for FS9 and FSX a number of years ago and this one use almost the exact same overhead panel. Despite it being totally different to the photographs of the real thing. This is strange to say the least (the Wilco version wasn’t actually called the AW609).


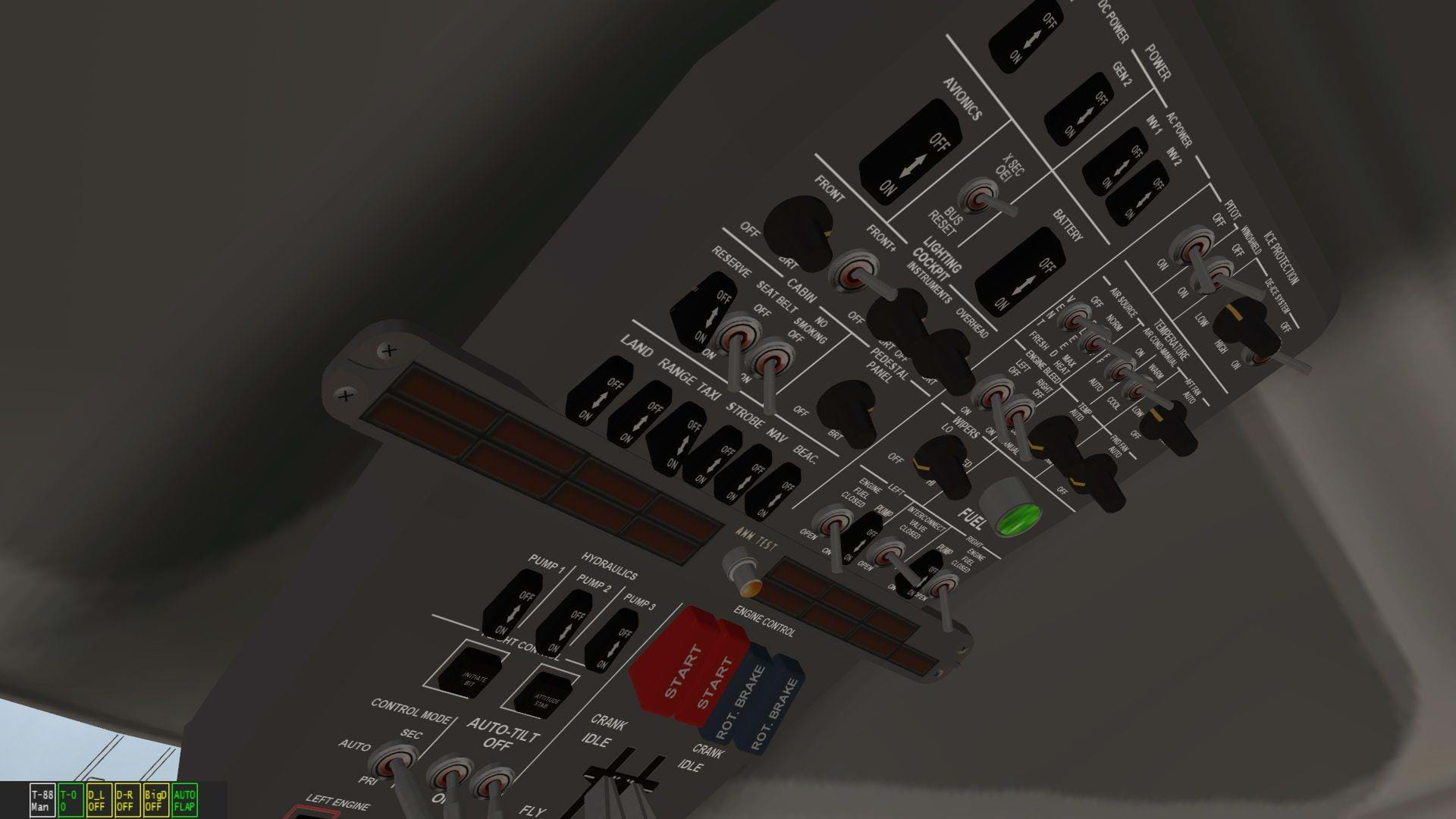
As you can see, the model bears little resemblance to the real article although given that the aircraft is pre-production and photo sources are scarce, I don’t think it’s that big of a deal. What isn’t so good though is some of the weird stuff in the cockpit. There are three sets of lighting controls that do exactly the same thing plus a series of ‘ghost’ switches that are also for lighting.

Despite the aircraft being pressurised, there’s no pressurisation panel, not even a dummy one, some of the displays don’t look like they’re attached to the panel and the pedals go the wrong way… pushing left pedal makes the right pedal go forward.
The basic PFDs are XP default, which is fine, I prefer the type of displays that the real one has but for the most part the default G1000 does the job except for the nonsensical engine information. There is also a trim display that is both useless in its position and also in the information that it delivers because as soon as you change the view, the readout becomes unreadable...


The other thing that I’ve noticed is the rotor/prop animations are a bit strange. To be honest, I’m not really a fan of what they look like when they’re turning. But the really odd bit is when you shut an engine down, the blade animation stops altogether. If you took a screenshot, you’d never know but it’s like the animation freezes when you shut down an engine.
Unfortunately, there are plenty more things wrong with the interior. It really just appears dated and a long way from being finished.
An addendum - added on December 16th, 2019

The author of the AW609 has since supplied a photo of the simulator cockpit for the AW609. It can be assumed that this will be very close to what the cockpit will look like in production. The small MFDs have been replaced with three much larger, what appear to be touch screen ones. One for each pilot featuring primary flight information on top of synthetic vision and the middle screen with a moving map and what appears to be systems information. In addition, there looks to be an autopilot installed on the top of the panel. The centre console has a keypad installed to punch information in for the computers. This brings the XP model a little closer in terms of basic look.
However, the new photo also shows how clean and uncluttered the cockpit is supposed to be. There’s very little extraneous information and the only backup instrumentation appears to be another A/H with tape type ASI and Altimeter. In addition there is a backup (I’m guessing here) RPM or nacelle position indicator. This goes against what is provided in the XP version. While the two PFD and one MFD layout is sort of correct, minus the synthetic vision and type specific information, the panel is the wrong shape and there is a heap of clutter that isn’t there in the real thing.
Now, in fairness to the author, unless they were going to go all out and make new MFDs with the correct type of information (a hell of a lot of work, I’m sure) then using these screens makes sense. Unfortunately, the fact remains that it still doesn’t represent the cockpit of the real aircraft very accurately.
Systems
This is where my job gets difficult. There is very little information out there about the actual aircraft and I could find no in cockpit start up videos. Instead of attempting to go through everything, I’ll simply go through the things that I know to be correct or otherwise.
I should point out that the developer has stated that this is ‘not exactly real avionic’. I guess that means that they acknowledge that the systems modelling isn’t realistic.
Throttles
The aircraft is powered by two PT6 engines, just normal turbine engines driving into a common shaft to allow for an engine to fail, not that that happens a lot with a PT6. As such, like a helicopter, the throttles are set to flight and the computer then takes care of the blade pitch relative to your inputs on the controls.
With the XP version, you have to manipulate the throttles to change the engine torque. Not the way it is in real life at all. In practice it doesn’t make much of a difference as you are moving the lever or slider on your controller the same as you would a collective on a helicopter. I know this to be the way the designer intended as when you’re moving the power lever, the person in the right hand seat moves her hand up to move the throttles. A nice touch, just not realistic. It’s going to have trouble receiving single pilot certification…
Prop RPM
The PT6s in the 609 are run by FADEC which manages all of the engine parameters to keep everything in the green range. Despite this, it is impossible to keep the ‘Prop RPM’ out of at least the yellow arc. If you bring it up to 40% torque, the prop RPM will be in the yellow already.

Auto Nacelle and Flap Position
The designer has included two presets for nacelle positions. 88 degrees for hovering or near hovering and 0 degrees for high speed flight.
The 0-degree preset after takeoff works reasonably well however, you have to pick your time to go back to the 88-degree preset for landing. If you do it too early, then the aircraft becomes very unstable as you slow down. On the real thing, holding the thumb wheel in the forward position smoothly moves the nacelles to zero degrees but I am unsure if there are any other presets.
There is also an auto flap setting that retracts or extends the flaps based on airspeed however, again, this has proved to be problematic to use and causes massive centre of pressure changes leading to loss of pitch control.
After takeoff, it seems to work pretty well but I suspect that it retracts them too early, you can be only 200 or 300ft off the ground and the flaps will start coming in at a very fast rate. The real aircraft does have some of these features, although I am unsure of exactly how they work.
I suspect that the transitions are much more gradual and coordinated with raising of the flaps. On the model, the flaps don’t have stops either, there are markings on the indicators, but you can set the flaps to any position you want. I don’t think this is the way the real thing is. In the sim I prefer to fly with a mixture of the assists and presets.
Undercarriage
Again, I’m not sure how the real thing is but the XP version won’t let you drop the gear above 300ft RA. I’m pretty sure I’ve seen vids of the real thing with the gear out much higher than that.
Doing a conventional landing, I think I’d rather have the gear out much earlier than 300ft and I can’t believe that Leonardo would have such a system in the real aircraft. Gear extension is usually tied to speed, not altitude. It’s a pretty bad system, beating up the runway one flight at 180kts, low torque on the engines as it is a slick ship, the gear dropped as I got below 300ft. All of that drag pitched the aircraft into the ground. If you can’t beat up the field at an airshow, how are you meant to sell them?
Autopilot
The autopilot mounted below the glare shield is a bit on an enigma. I’m not sure if it’s meant to work with such an aircraft as trying to set it up after takeoff and cleaning up the machine (flaps, nacelle position) is too much for the autopilot to handle. You’re better to hand fly it until you get into a stable cruise and then engage. As a side note, the aircraft is equipped with AFCS and this does reduce pilot workload a lot.
Other Systems
As I said before, there aren’t a lot of systems to play with in the cockpit. Hydraulic switches do nothing, APU will start without battery power to the bus and doesn’t appear to do anything at all in terms of firing the machine up, no pressurisation panel, there are needles missing on gauges etc.
Overall, it’s not really that good in terms of systems. Given that information on the real aircraft is limited and it’s unlikely that the designer could go and ‘stick his head in one’ I feel that they should’ve concentrated more on getting some plausible systems working properly.
Sound
Most of the noise on conventional helicopters comes from the tail rotor… that’s why NOTARS and Fenestron machines sound so different. It would be fair to say then that a tiltrotor is going to sound VERY different.
The simulator version is accurate. And it isn’t at the same time.
None of the controls or switches in the cockpit make noise. In flight of course, this doesn’t matter but I feel like it should be something that developers look at. The flap and gear sounds seem to be XP default, or they’ve come from something else.
APU start and engine start sort of sound like what they’re supposed to but again, I’ve heard both sounds used in other addons so they’re not new. The sound that the aircraft makes when it’s up and running is relatively accurate but it’s irritating at the same time. I have no idea where the sounds came from but it’s almost like they’re very short sound files and so the looping is quite obvious.
It’s not irritating in the same way that a Lama running at full volume is irritating (or great depending on who you are) and in all fairness, when you’re busy flying it, the sounds become less of an issue to me.

Not a very extensive sound suite but certainly the right idea for the type of aircraft. I would say that it needs a fair amount of tweaking though.
Flight Dynamics
Being as this is a completely new type of aircraft for me, I approached the flight testing for this review much the same as the real test pilots did. Start up on the ramp with the nacelles at 90 degrees (full hover mode) and the flaps fully extended.
The blades start spinning far too quickly. They do spool up rather rapidly in real life but not like this. Increase torque until the aircraft gets light on the wheels. Now, if you watch the real thing it is common to see a bit of a drift around a little bit so I’m not that concerned if I get a bit of the same.
When it gets airborne, for some reason I found that it really wants to keep climbing straight up. Yes, it’s in ground effect but if you don’t reduce the torque, it’ll climb away quite quickly. The aircraft, thanks to the AFCS is quite easy to hover, much easier than most helicopters.
I initially had the ‘thrust vector’ command in XP for the nacelles set as one of the throttles on my HOTAS, however I think that having a slider or something that is less likely to move on its own is a much better idea.
My only complaint really is that it feels like it’s a bit too hard to move the aircraft around in the hover. Turning the AFCS off helps but I feel then that it loses the stability that an aircraft of that size should have. In short, you have to try both and decide what suits your purpose.
I spent about 20 mins just hovering, trying to get a feel for the aircraft before I attempted a transition. Transitioning requires coordinating nacelle position, engine torque and flap retraction all at the same time.
I certainly climb up around 400ft to 500ft before attempting this as if you get it wrong, it produces some quite severe trim changes and at low speed, you have no elevator authority to counteract it.
Through about 120kts, the regular flight controls start to become effective. Once the nacelles are rotated through to zero degrees (fully forward) it does fly more or less like a conventional aeroplane. I think that it feels a bit like it’s on rails with the AFCS engaged however so I recommend trying both modes.

The transition back to helicopter mode requires a bit more finesse than going the other way. It’s a case of coordinating the rotating of the nacelles and reducing torque to keep the aircraft relatively stable.
Deploying the flaps when going for a vertical landing is not as much of a problem as long as you have the thrust vector already pointing down. Doing it too fast though will cause pitch changes that you don’t have the elevator authority to correct. The trick I found is not to rush it but take a long run into whatever pad you’re going for and take your time. Once you get the hang of it, it’s very easy.
Taking off in aeroplane mode is a relatively simple affair also. Nacelles at 45 degrees and increase torque. The aircraft flies away fairly nicely just like any other aeroplane would. Once airborne at around 110kts, it climbs away nicely except that with the auto flaps engaged, the flaps are retracted by the time you rotate.
Coming back in for a landing in aeroplane mode is a bit of a different story though. I find that it’s best to control the nacelles manually to get a smoother change in the thrust vector and deploying the flaps although, once close to 130kts, the nacelles should be close to the 45 degree mark as this is when things can start to get hairy.
There are spoilers on top of the wings that act as airbrakes. However, I think that these are a little too efficient as deploying them at any sort of speed feels like you’re going through the windscreen, they sure help to slow you down.
Single engine performance is OK in the hover and in forward flight however both engines inoperative flight isn’t really on the cards. According to the test pilots, a dual engine failure, transition from aeroplane to helicopter mode, recovery of RRPM and a safe autorotative landing requires approx. 3000ft of air with a ROD of about 3500fpm.
Unfortunately, the model doesn’t allow any of this. Rotating the nacelles produces a drop in RPM and you find yourself putting it back into aeroplane mode and diving to get your speed up so that the wings do something. They’re very short wings too so they don’t do a lot for your glide performance. Fred Haise and Gordon Fullerton would’ve been very at home flying Space Shuttle approaches in this.

Despite all that has come before, if you don’t go to the corners of the flight envelope and fly conservatively, it is actually a bit of fun. It’s quite satisfying to be able to take off vertically and boost through to 270kts in a very short space of time. The presets need to be played with as well as the flap and gear systems mentioned before but it is still quite a fun and semi - probable flight model.
Miscellaneous
Documentation
The documentation for the aircraft comes as a 26-page PDF file that covers a little of the history, cockpit layout and some tips for flying. To be honest, I know the company is based in Switzerland, so they speak French and German…. but they need to get somebody with a good grasp of the English language to write the English version. There are lots of spelling and grammatical errors that don’t really make the company come across as professional. In addition, I didn’t find the information contained within very helpful when I was trying to piece together the presets for the nacelles.
Viewpoint
I can’t find anything on this but I’m pretty sure that the real aircraft is flown from the left-hand side. On the model, the person in the right seat operates the throttles on the roof which I mused about before, so you would expect that the person with their hands and feet on the controls would be on the left. When you go to cockpit view though, you’re on the right….
In Summary
I want to like this aircraft, I really do. I’ve never really thought too much about tiltrotors until I started doing this review and I find the concept fascinating. Unfortunately, the model, the lack of systems modelling and some strange behaviour in flight prevent me from being able to get really excited about it. All is not lost, however. For casual flying, the sort where you say ‘I want to go from here to here and I want to do helicopter stuff at both ends’, this isn’t the worst choice. Look outside and enjoy the scenery going by AND enjoy getting there quite quickly.






