
[Editor's note: FlyInside has been releasing updates, which may change/fix/improve some of the items described in this review. We may revisit this article in the future, once the helicopter is more stable. Meanwhile, expect us to do some edits now and then.]
There aren’t any helicopters available for MSFS. MSFS didn’t even ship with helicopters.
Helicopter enthusiasts had to wait until a month ago to finally have default helicopters for this new sim. Third-party developers have always been the core of hobby flight simming and MSFS is no different and there have been a few third-party helicopters released for MSFS in the past.
Most notably the Hype Performance Group H145, and the FlyInside Bell 47. Today we’re going to have a look at FlyInside’s second release, the Bell 206.
At this point, we all know what a Jet Ranger is. Somehow, the Bell 206 always finds its way into flight simulators and now, after a few years, the Jet Ranger has made its way back to Microsoft Flight simulator.
By the way, there’s another 206 out there, by Cowan Simulation. Knowing the community like I do, a lot of you are going to want to see direct comparisons between the two models. If you’re not familiar with my reviews, I try to avoid sim to sim reviews. But what I will do is compare the models to my experience with the actual aircraft.
Like most Army, Navy and Marine helicopter pilots my age, I got a few hours in a Jet Ranger. The Army has only recently divested the airframe replacing it with the UH-72. The Navy is also replacing their TH57’s with the TH-73A. However, when looking at this model, it’s apparent that this might actually be representing a 206A which to my knowledge would be the first for any flight simulator. So far, I’ve only seen 206B’s, mostly if not all 206B-3’s. So, if my hunch is correct FlyInside has given us the first 206A, but it’s hard to say because it’s not specified in any of the marketing I’ve seen. [Editor's note: FlyInside confirmed it's a 206B3. Thank you to FlyInside for the clarification.]
FlyInside isn’t a new company. They were the first developer to bring us a reliable VR experience in FSX and X-Plane, even before Laminar Research integrated native VR support. So it’s safe to say that they know their way around flight simulators. But, can they build a good 206? Let’s find out!
Installation
Having gotten quite used to X-Plane, I was a bit surprised to see an installation exe. This was pretty common for ACOF and FSX payware, so not completely unexpected for a MSFS model – and actually quite welcome considering that the community folder is buried pretty deep in the file structure. The installer, not only installs the aircraft, but installs the FlyInside Heli Manager as well.
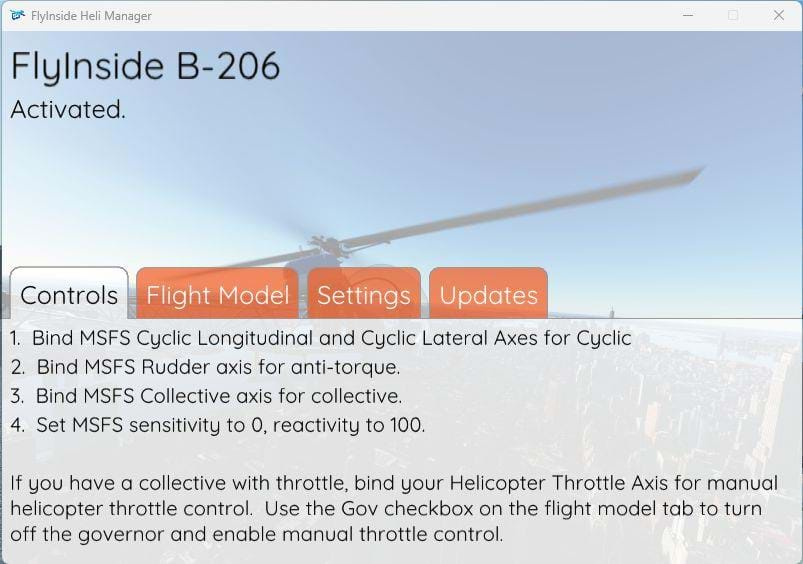
FlyInside uses their own flight model, not the new one introduced in November of this year. You can adjust this flight model from the Heli Manager. The Heli Manager also tracks updates and provides a link to download them.
There’s been three updates since I started writing this review, so if you purchase this model after you read this, there’s a strong possibility that it’s a different version than what I’m showing here.
First Look
The external model of the FlyInside 206 is generally good. The basic shape and proportions of the classic Jet Ranger are good.


The FlyInside 206 has a lot of external click spots that give the user visual access to the inside of the model. All of the pre-flight panels are clickable, showing the user what a pilot would when checking the aircraft prior to take off.

Each panel that opens has something to see. The internal components there aren’t the cleanest. It appears to be a 3D scan of the actual parts, and not a component created in a 3d modeling program. But it’s still cool that they’re there!

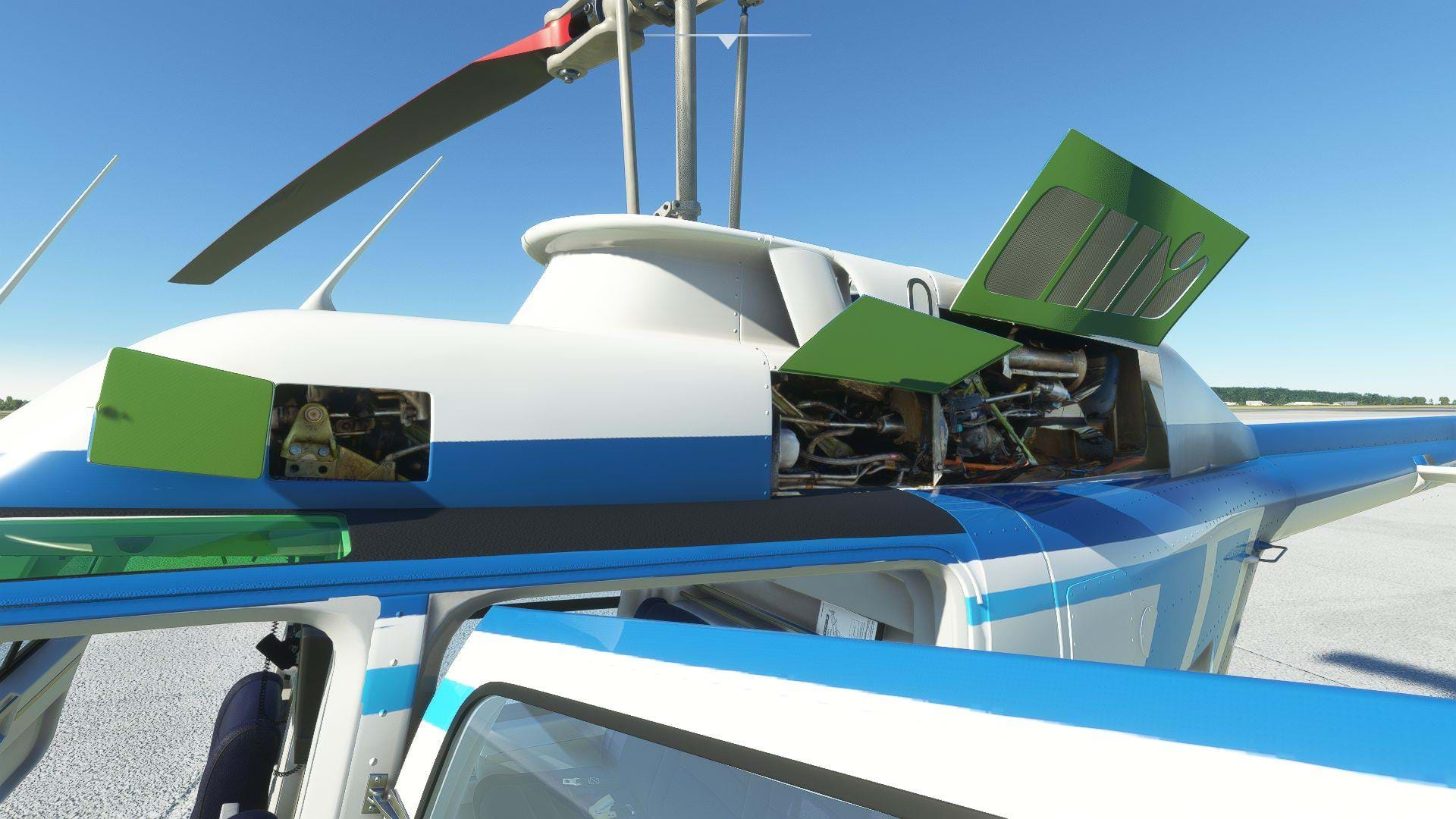
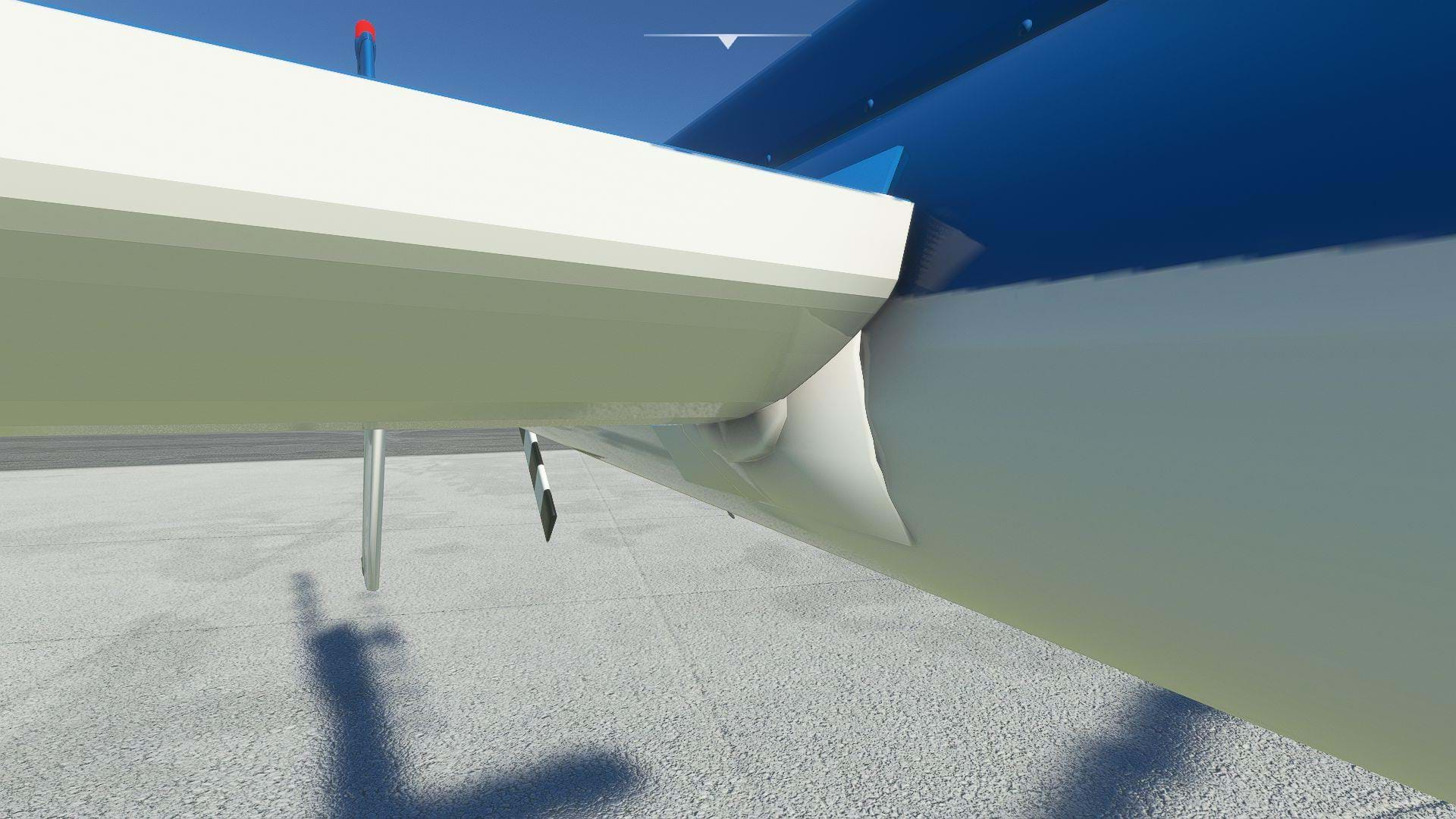
While it’s neat that all of these components are there, they don’t quite fit into the external 3D model. When looking from below, you can see some pretty big gaps where the internal parts would meet the airframe.

Something that I thought was an interesting choice was the mesh on the engine access doors. They’re textured in a way that prevents the mesh from actually being see-though. It’s just a solid panel with dots on it. It would be great if they could make it more like actual mesh so they can show off the details inside.


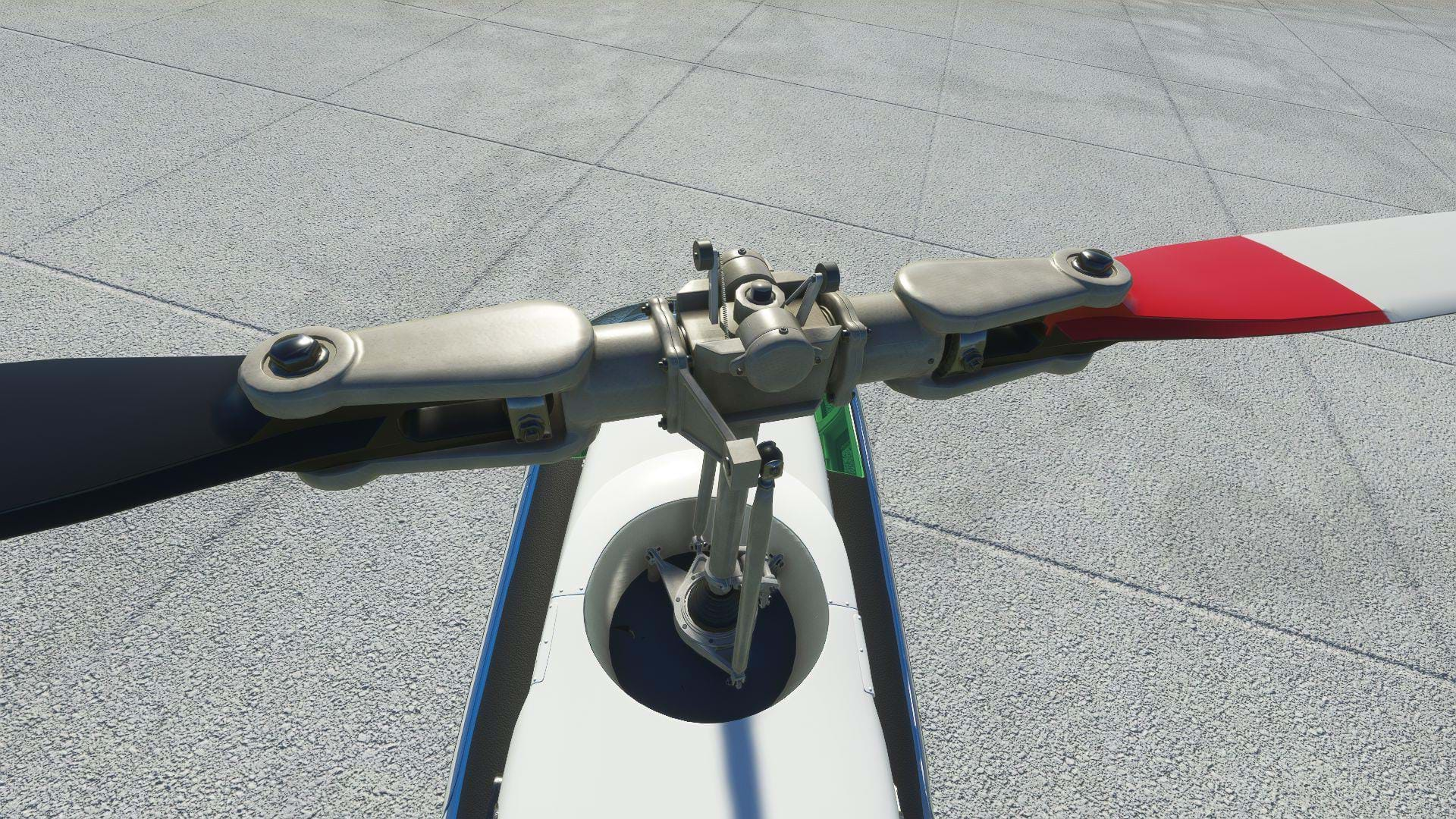
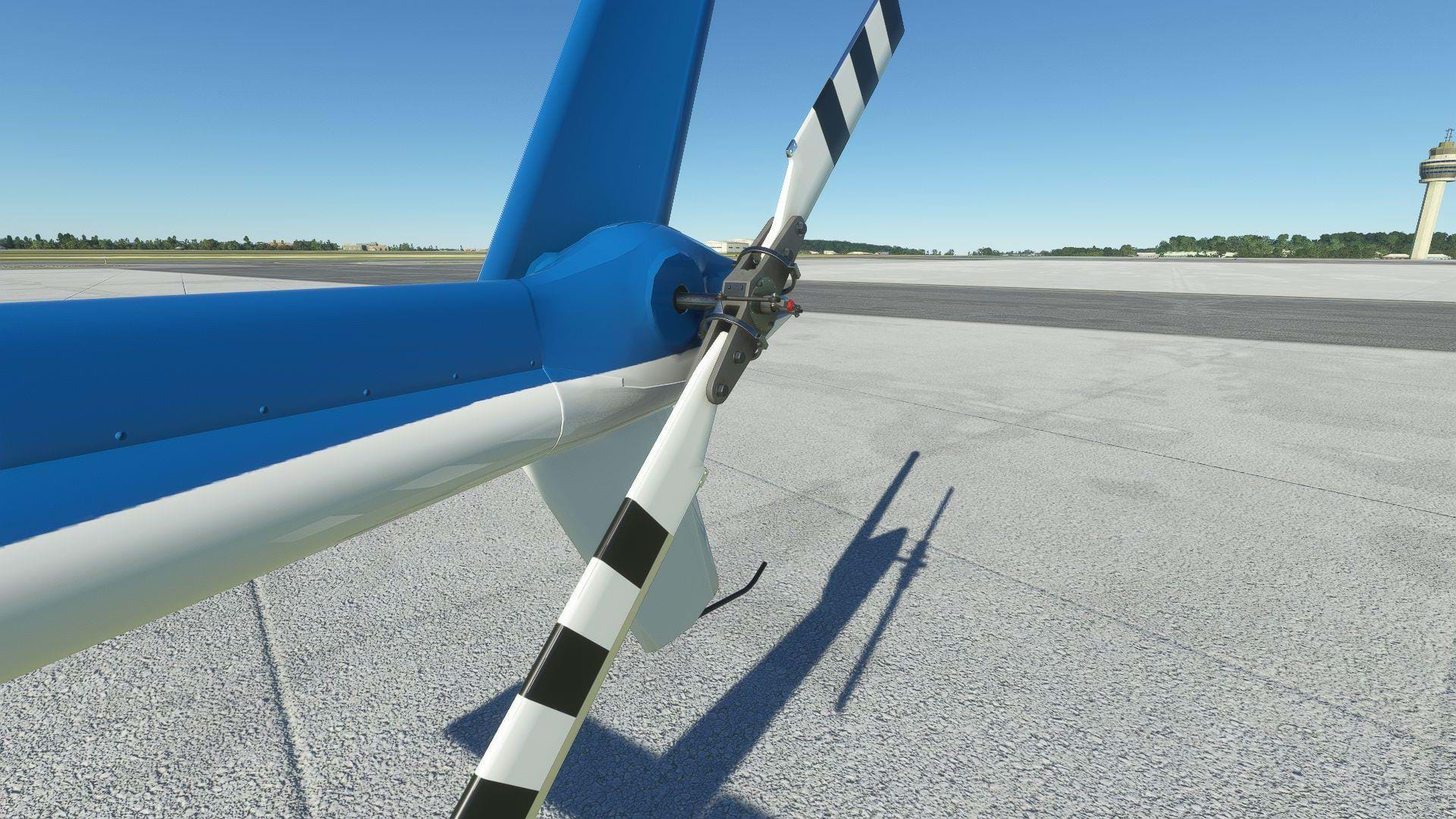
The main rotor looks pretty good, all of the main components are present, with some good details and animation. Like the rest of the model, it’s not as detail heavy as some other MSFS models are, but it’s a decent representation.
One detail I kind of like is that one blade is painted all black while the other has viz striping. This may seem like an error, but this and variations of this were pretty common with helicopter operators, especially in the late 90’s and early 2000’s. I haven’t seen it as much lately, but the idea is to create contrast between the two blades. This makes one blade much more visible at a distance, thus making the helicopter itself more visible. The 500D I trained on had one of the five blades painted entirely white on top. This gave the impression of a single white stripe swinging around the aircraft and was very eye catching.
The local sheriff department painted one blade of their Bell 205 white for the same effect. I don’t see this as much now, and I don’t know if the developer did it for the same reason, but it was cool to see on this model.


The tail rotor looks just as good.

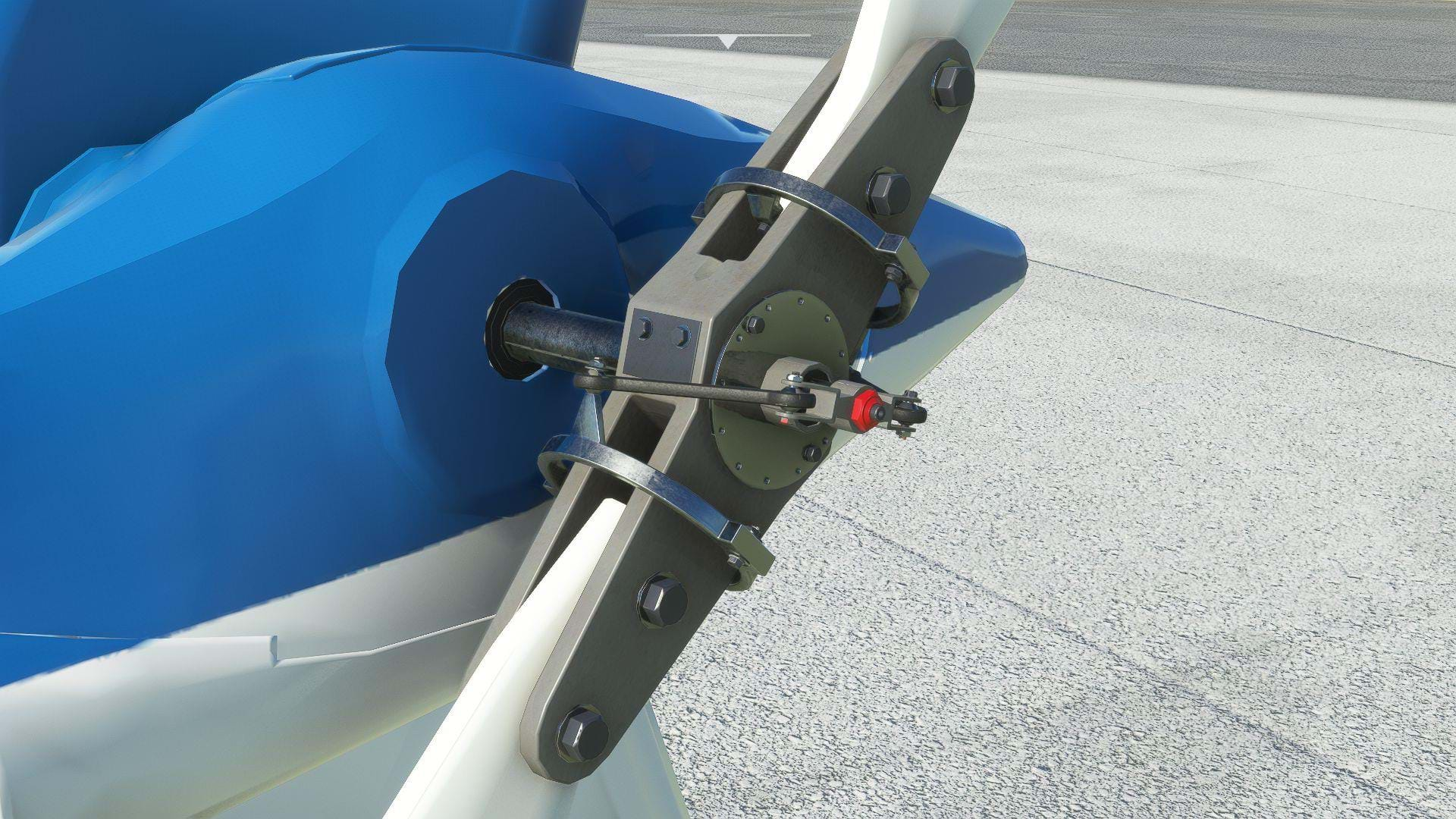
While the general look of the FlyInside 206 external model is good with a fair amount of detail, I feel like it’s unfinished. Along with the poorly fitting internal structures, there are some other bits on the model that look like they were still in development when it was released. Three examples of this are the battery door in the nose. When you click on it to open it, you can see that the underside of the door isn’t modeled at all. [EDITOR NOTE: this was fixed on the 1.94 update but we left it in the original text just as a reference as this is a demonstation of the continuous work by FlyInside].


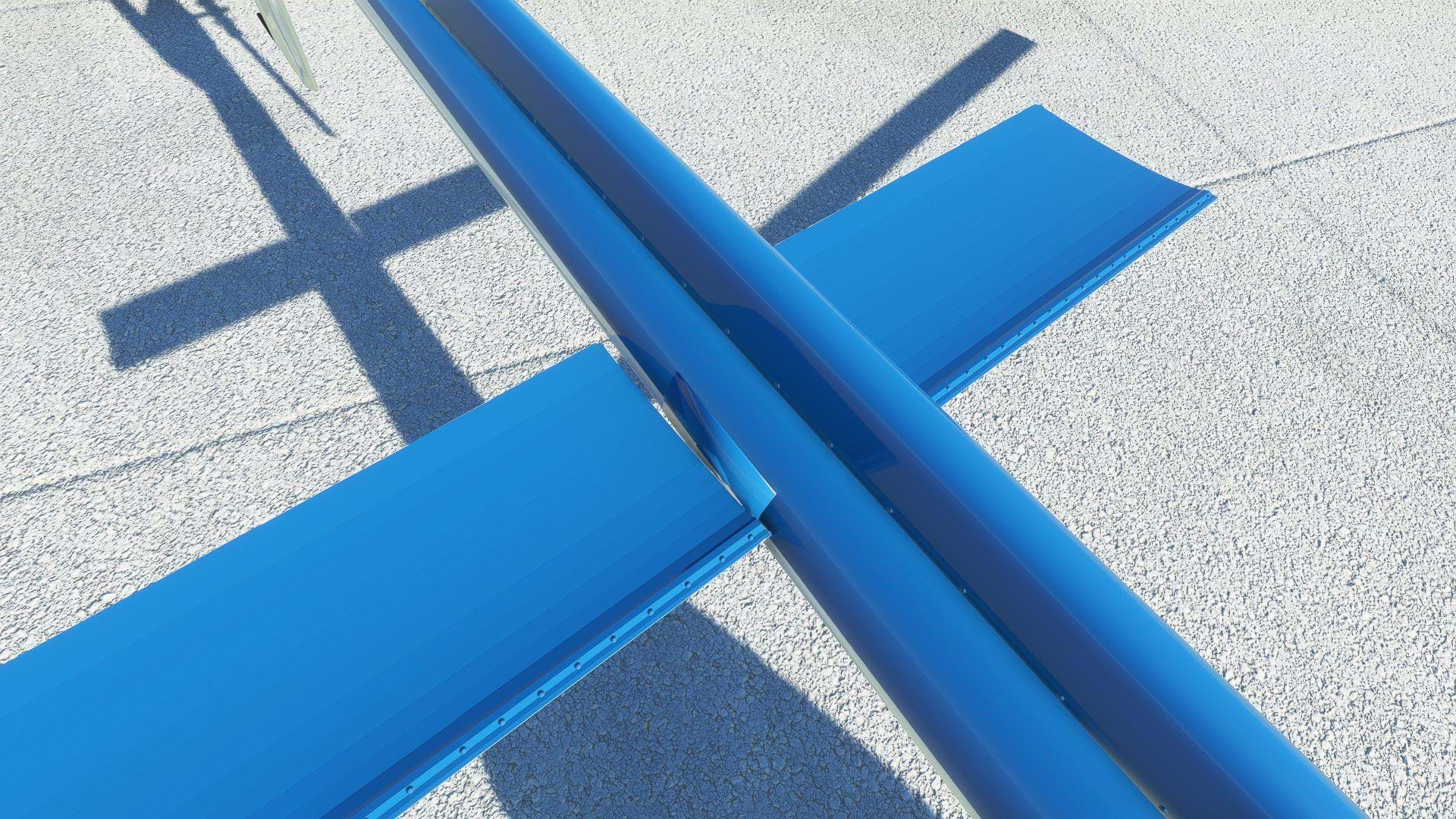
Another area that might need some attention is the horizontal stabilizers, in particular where the stabilizers meet the tail boom. They seem to attach to a mound that sticks out from the tail on each side. The 206 has a reinforced area here that this could be representing. Or perhaps this is something the 206A has that I’m not familiar with?
Also, the static port has the airflow strakes, but, well, no actual static port. It’s a small detail, they all are. But it gives me the sense that this model was rushed. Hopefully future updates will correct these deficiencies.
The cockpit model is pretty good. It’s not quite as detailed as I think it could be, but it’s still representative of a Jet Ranger. The general layout is familiar, and the overall size of the cockpit feels right in VR. The texturing is very simple and doesn’t seem to take full advantage of some of the features that modern 3D modeling programs offer.


The instrument panel is basic, nothing extra, like most Jet Rangers are. The gauges look good, and the warning caution panel is functional. The overhead panel looks pretty good as well.


The flight controls are ok. I say that with the flight grip on the cyclic in mind. For some reason, the B8 seems to be the single hardest thing to get right from a 3D modeling standpoint. Almost every helicopter I’ve reviewed depict the B8 with some weird and wonky proportions. They’re almost all wrong and the FlyInside 206 struggled with this too. While this isn’t the worst B8 Flight grip I’ve seen, it does fall short of doing it justice.


If I had one more complaint about the cockpit of this model, it would be the scale of some of the components in VR. For example, the fuel valve switch is TINY! The David Clark headsets also look small to me. It’s not a deal breaker, but those and other scale issues caught my eye.
The passenger seats in the back look appropriately cramped and uncomfortable! There are a few cool details here, like the POH in the back, and an egress info card.


Overall the visual modeling of the Flight inside 206 is good, but not really on par with other MSFS models.
Sounds
The sounds on this model are great. Clearly recorded from an actual aircraft, they all sound convincing and accurate. The engine compressor spool up sounds a little low pitch to my ears, and the sound of the ignition exciters sounds pretty low. But light off sounds right and rolling the throttle from idle to full sounds almost perfect.
Systems
There isn’t much to a Jet Ranger. It’s a simple helicopter that has simple systems. This model does a pretty decent job of replicating them.
If I had one complaint about the systems modeling in the FlyInside 206, it would be the lack of an Idle detent on the throttle. [Editor's note: update 1.97 has brought this feature to the FlyInside 206]
Now to be fair, it’s an achievement in itself to get a usable throttle in MSFS. Even the Bell 407 that comes with the simulator couldn’t get that right. So, the FlyInside 206 is the first helicopter model I’ve seen besides the G2 to get the throttle somewhat right.
The lack of the idle detent makes engine starting kind of a pain. Typically, when starting a turbine engine with a collective mounted throttle, introducing fuel is a matter of rolling the throttle past the idle detent and then back to the idle stop. This is a difficult thing to model in a sim because it’s a mechanical function that physically limits the travel of the throttle. Various developers in FSX, X-Plane, and DCS have approached that challenge in different ways. FlyInside appears to have approached it by giving the user an audible cue as to when the idle stop engages.
This is somewhat useful, except there’s nothing preventing the user from rolling the throttle all the way off. So, when I started this model for the first time, muscle memory kicked in, I flicked the throttle open, and instantly rolled it back to bring it back to where an idle stop would be. But because there’s no physical stop, the throttle rolled back enough to stop fuel to the hot section. So instead of the normal C20/18 start, the FlyInside 206 feels a lot more like a modulated start of a C30.

This model also has a functioning hydraulic system, which is really cool. There are only a few models across all of the platforms that make an attempt to replicate this. The 206 has hydraulically boosted controls, not hydraulically driven, it drastically reduces pilot workload and makes the aircraft much easier physically to fly.
This model replicates that by making the control response drastically different when the hydraulics are turned off, which is neat. The effect is a bit overdone in my opinion, because the aircraft becomes uncontrollable very quickly.
Hydraulics-off flight was a task that we had to train when I was flying Jet Rangers, not often, but enough to be familiar with the handling qualities. It’s certainly possible to lose control of a Jet Ranger without hydraulics, but the effects in this model are a little dramatic.
Everything else on this model is pretty straight-forward. Battery and electrical systems are simple and functional.
Flight Dynamics
So, how does it fly? Well, let’s talk about it. Helicopters are relatively new to MSFS, but like I mentioned earlier, this is FlyInside’s second helicopter. I haven’t tried the Bell 47 that’s also done by FlyInside, so I’m walking into this evaluation with an open mind, managed expectations, but at the same time, high hopes.

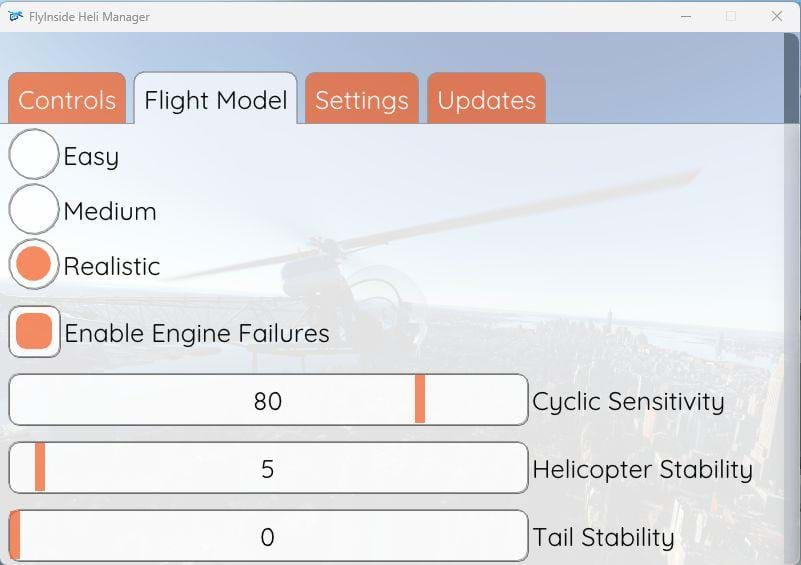
The Heli Manager gives two presets for flight model tuning, Easy and Realistic. And if you want to tune it even more, you can adjust cyclic sensitivity, and Helicopter stability. The Realistic preset sets cyclic sensitivity to 80% and helicopter stability to 5 %. Given this was the developers recommended setting, that’s what I went with.
I’m familiar with the 206 and OH-58A/C. Granted it’s been a few years since I’ve flown one, but I spent a lot of time in the Jet Ranger in the early years of my career. I remember it fondly; it’s a well-behaved docile helicopter that really didn’t have any bad habits as long as you keep the nose into the wind.
Autorotations were surprisingly easy compared to the 300C that I had trained on previously. It wasn’t as nimble as the 500D I did my turbine transition in, but as long as you didn’t weigh too much and the temperature outside was reasonable, it would do what you asked it to do with little fuss.
When I first picked the FlyInside 206 up to a hover using the realistic settings, I didn’t get any of what I expected. The aircraft leapt off the ground nose high and started flying back and to the right like a startled puppy franticly backing out a room after being yelled at.
Not a great first impression, but it’s a new model, and a new platform so I wasn’t going to give up. I managed to get it somewhat under control but then found that my lateral cyclic corrections were setting up some pilot induced oscillations. I couldn’t really find a sweet spot of cyclic input that the model would accept. It was either too much or not enough.
It was just way too easy to over-control in the roll axis. At first, I chalked this up to getting accustomed to the MSFS being a new-ish platform for me to fly helicopters in. When I don’t fly in DCS for a while, my hovering is a little squirrely until my muscle memory kicks in, it’s the same when I fly a real helicopter that I haven’t flown in a while, so it’s not unheard of.
I get really humbled when I sit behind the cyclic of a real Astar after not having flown one for a while. After about five minutes of this, I was able to bring it to a somewhat stable hover, but the lateral oscillations were always a challenge to keep in check. I don’t remember every having that issue in an actual Jet Ranger.

Transitioning to forward flight, takeoff power seemed appropriate for the weight and DA. The transition was smooth with no surprises. The tendency for the lateral oscillation was still present, but much more manageable. Other than that, cyclic response was good, the collective inputs felt natural, and the pedal inputs required to keep the model in trim were as expected.
Landing was mostly straight forward until the benefits of airspeed were no longer present. The lateral rolling started again, and as before, the model was simply not happy with whatever cyclic input I put in, and severe over-controlling began again.
The only real solution was to let the aircraft drift in the direction it wanted to go, and then try to gently coax it to a stop. But even then, it was a challenge, and at that point, I was negotiating with the model, not flying it. It was pretty apparent that this behavior didn’t match anything my muscle memory had stored from flying an actual aircraft. So, rather than just learn a new sim, I thought it would be time to go back to the Heli Manager and see if I could get it tuned to something that was closer to the Jet Ranger that I remembered.

I tried a few combinations, but what I eventually settled on was increasing the helicopter stability from 5% to 10% and increased the cyclic sensitivity to 90%. This gave me the Jet Ranger I remembered or something close to it at least. These settings worked well for me, but you may have to find the settings that work well for you. The tendency to oscillate laterally is still present, but much more manageable.


The model generally performs really well in most cases. However, there are a few notable deficiencies I discovered during my testing.
Tail rotor authority tends to be limited during low speed and hovering turns. I did most if not all of my testing for this model at airports that were practically at sea level. The amount of left pedal at a hover felt appropriate, however, it took much more pedal than it should have to make left pedal turns, even in light to no wind, it was difficult to bring the nose around as I the left pedal would hit the stop.
To be fair, the 206 isn’t known for exceptional tail rotor performance, but barely being able to make left hovering turns in light winds doesn’t match my experience with the 206.


I did notice that IGE hover power and OGE hover power are pretty much the same, which isn’t surprising. Very few simulator models on DCS, or X-Plane can have an accurate depiction of out ground effect power requirements.

Autorotations in this model are pretty good. RPM management is pretty realistic, and the inertia in the main rotor is good. Rate of decent during the autorotation was realistic but the flare at the end wasn’t as effective as I expected it to be. It was still pretty good.

It seems that what the FlyInside 206 lacks in visual modeling, it makes up for in systems and flight modeling.






