SA342 Gazelle for FSX and P3D.
For this review, I’m avoiding a direct comparison between the MP Design Studio Gazelle, and the Poly Chop Gazelle for DCS. To compare the two models would really be a comparison of FSX and DCS, and the programming and modeling capabilities available in each platform, not necessarily the abilities of the individual developing groups. So this will mostly be a review of an FSX model, as it operates in FSX. Any comparisons made will be to another FSX model.
Installation
This model comes with a very easy to use installer. Just select the folder where FSX is installed and let the installation program do the rest.
First look
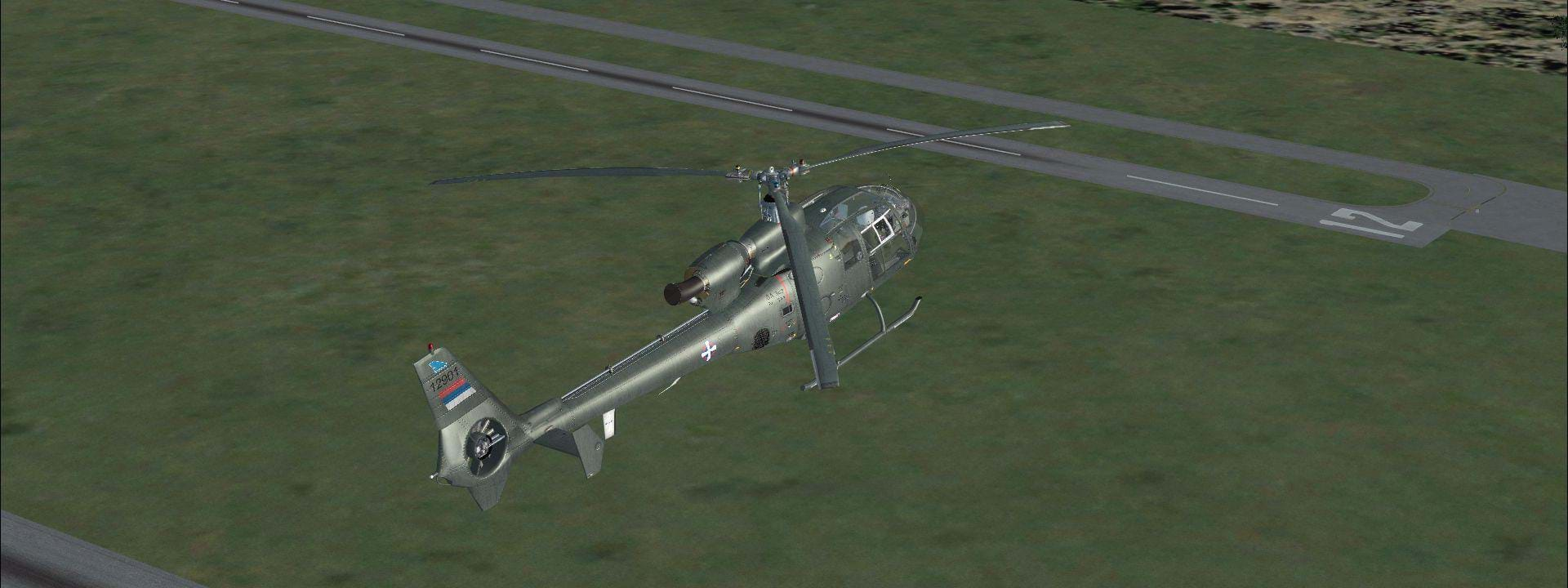
The first thing that sticks out about this model is its big beautifully curved reflective canopy. It’s reflective both inside and out, and that reflection is dynamic. So as the attitude of the helicopter changes, the reflection changes accordingly. I know this is present in other FSX models, but the big windscreen panels of the Gazelle really take advantage of this. Some might find the reflection distracting when flying from the virtual cockpit, but it didn’t bother me at all.

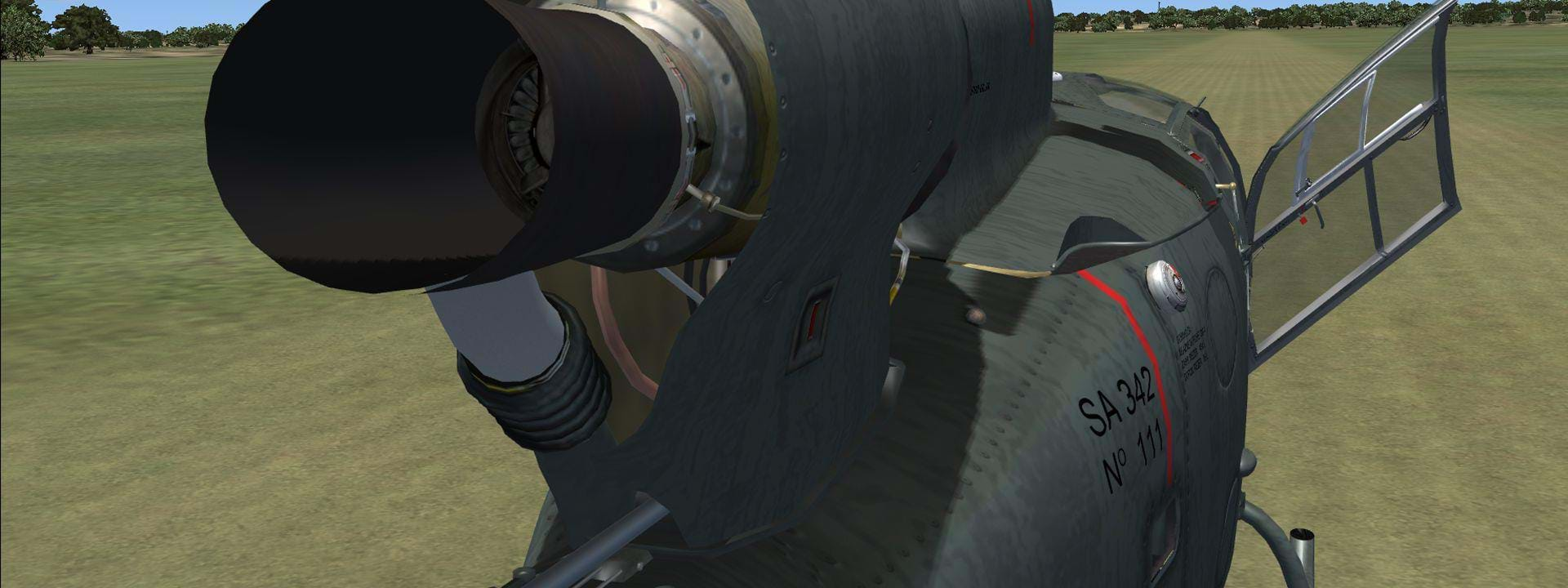
The textures of the outside model look as if they are a mix of photo based textures, as well as late FS9 early FSX era texture techniques. This isn’t to say that the textures look bad, just a little dated. There is only one livery available, so hopefully for the gazelle fans out there, a paint kit will follow shortly. That being said, the one livery available looks pretty good. Rivets and panel lines are all present and in their proper locations.

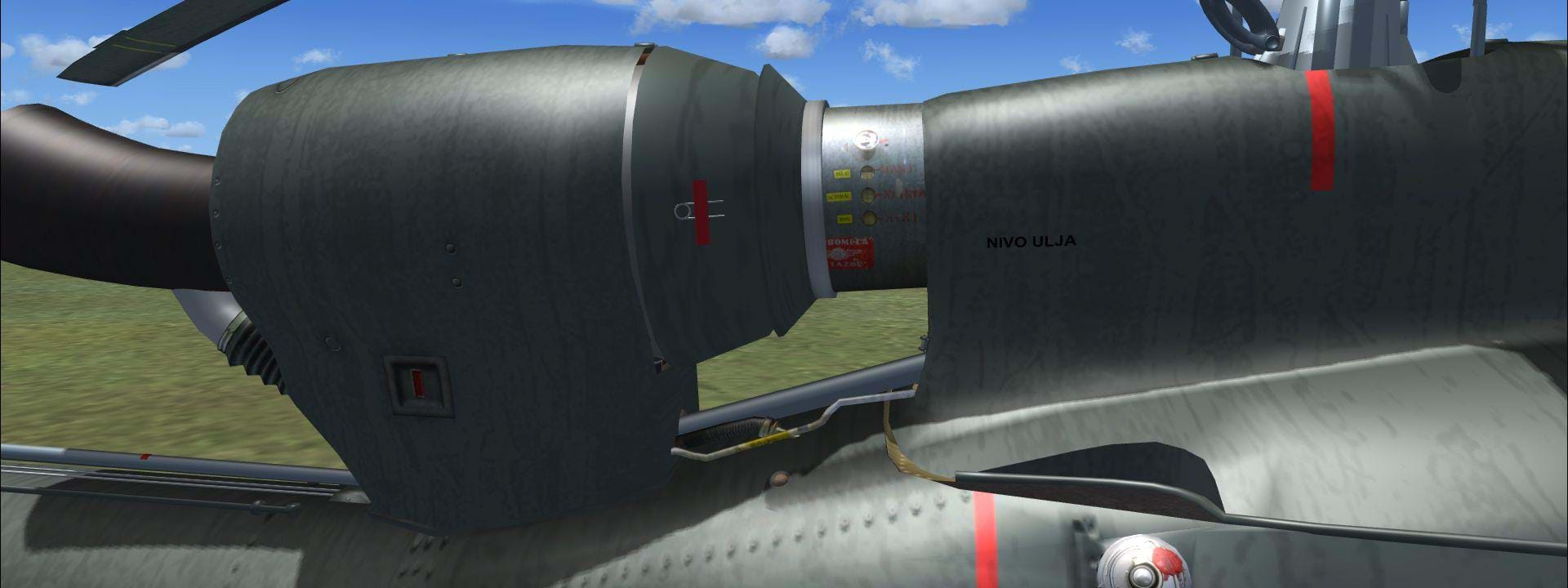
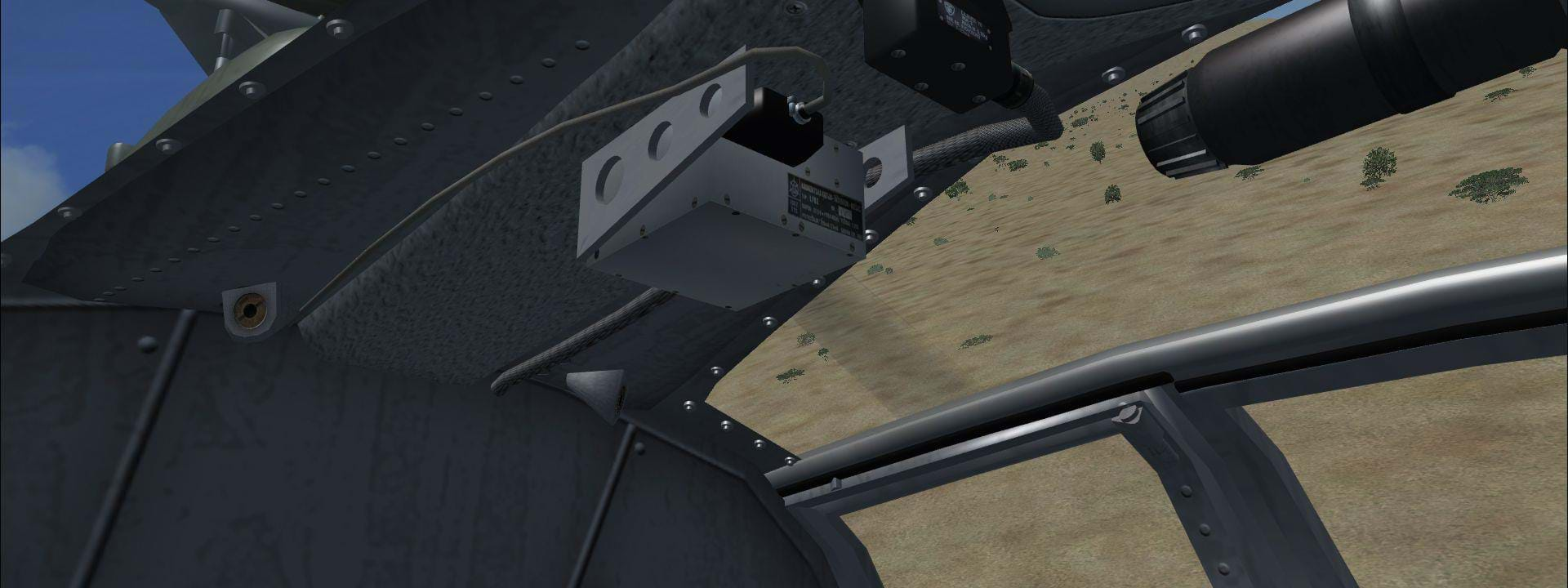
A quick look around the aircraft reveals some additional details. The engine and engine compartment features tubing, ducting and sight gauges. There are also a few other details on the rest of the fuselage that are nice, like the fuel cap, retaining pins and tie down rings, and various data plates all over the fuselage.

The main rotor head is made up of some basic polygon shapes, covered in what looks like photo style textures. I suspect the developer went this route because helps maintain some details, as well as keeping the poly count at a minimum to help with frame rates. This makes this model a little more accessible to users on less powerful computers.
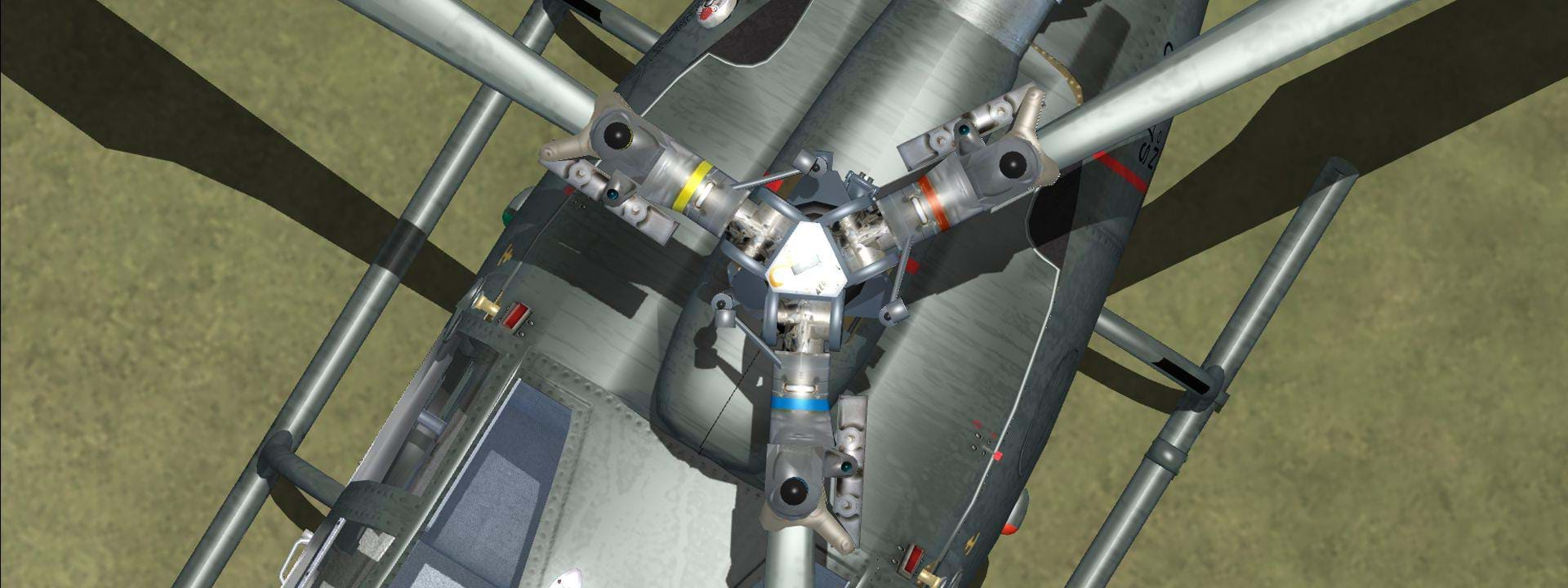

The animation of the rotor system leaves a bit to be desired. Its rotation is unusually slow. To explain it a little better, it’s almost as if the rotor was being displayed at 7-10 FPS, while the rest of the model displays well above 60fps. This isn’t as apparent in the virtual cockpit view, but very noticeable in external views.
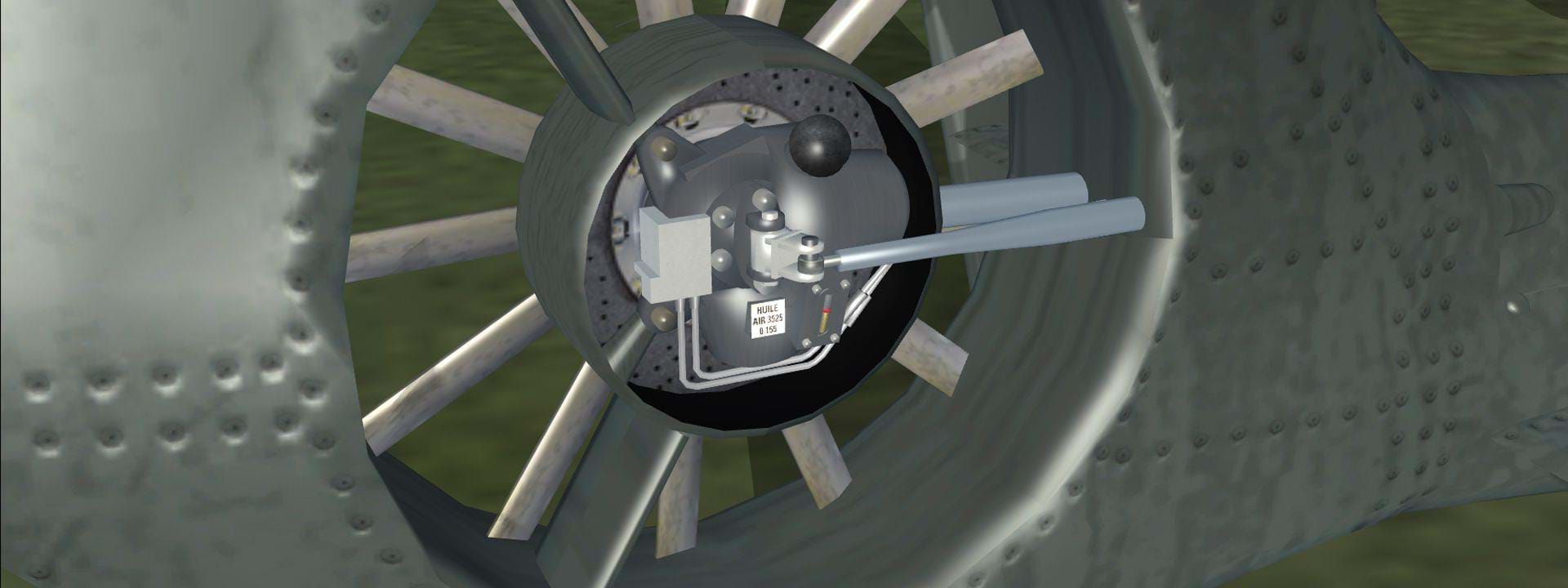
The Fenestron has some good details, especially the animation of the push/pull tube.
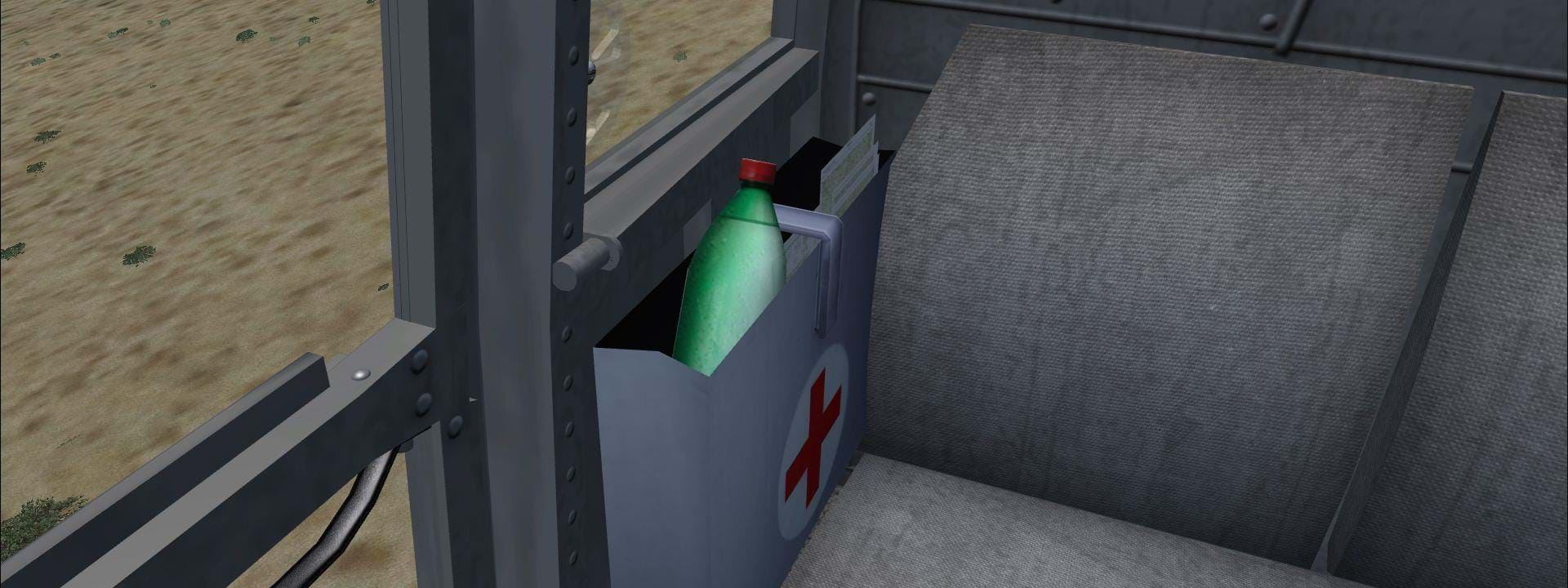
The Cockpit modeling is also pretty good. Here again we find some textures that look a little dated, but there are some highlights. The Cyclic grips look like photos were used as a base for their textures, as well as the data plates found in various areas of the cockpit. Door handles, switches, knobs and levers are all modeled pretty well.

One of the highlights of this model is the vibration animations in the virtual cockpit. While the engine is running, you’ll notice the instrument panel and various other parts of the cockpit move as if they are vibrating from all of the moving parts swinging above your head. This gives the impression of an active dynamic cockpit in flight instead of the static environment usually found in an FSX model. This is the first time I’ve seen cockpit vibrations done this well in an FSX and it must have taken a lot of time and energy to get that right.
Sounds
One of the best things about this model is the sound modeling. Both internal and external sounds appear to be recorded form an actual aircraft. The best part is it’s replication of what is usually called “blade slap” here in the U.S.. The actual name for this phenomenon is Blade Vortex Interaction, which is just a fancy way of saying rotor blade is hitting the vortex left by the rotor blade in front of it. This causes a sudden change in angle of attack and increase of surface pressure on the blade tip. This creates that sudden Popping or slapping noise that is heard when a helicopter enters a steep turn or is in a constant low speed, steep power on decent. MP design studio’s SA432 gives the user an opportunity to hear this during steep aggressive turns, which is a nice added effect.
Flight dynamics
Once again, this isn’t going to be a direct comparison to the recently released DCS SA342 that I reviewed a few weeks ago. One can’t expect an FSX model to behave in a similar fashion to a DCS model, because the FSX platform simply won’t allow it.
All that being said, the MP SA342 is a very docile, compared to some other light single engine FSX models. Its responsiveness is about average for FSX, and torque effect seems to be minimal. But, it should be noted that the torque effect that is there requires right pedal to maintain heading during take off to a hover, as it should with the clockwise rotating main rotor, just not very much right pedal.


One of the biggest draw backs to this flight model is the autorotation characteristics. Helicopters in FSX generally don’t auto very realistically. Some models do better than others, but generally speaking, FSX isn’t very autorotation friendly. But this model presents an unusual quirk that makes practice autorotation with the power set at idle extremely difficult, if not impossible.
If you’re flying with 50% torque or greater and pull the power to idle to begin an autorotation, the rotor will come to a complete stop! Now, keep in mind, for this test, I had 70% fuel on board, on a cold day. It took about 56% torque to maintain level flight at 90Kts. FSX or not, this isn’t very realistic. If you’re flying at less than 50% torque or if you lower the collective first and then pull the power to Idle, the rotor will continue to rotate. You’ll get a temporary droop in RMP and then it will return to the green arch. But it will still come to a complete halt, once you lift the nose and raise the collective at the end of your flare causing a complete loss of control. This problem is compounded by very poor pitch control when the collective is all the way down during an autorotation. So as you raise the nose at the bottom of your auto, it’s slow to respond, which means there is less kinetic energy being traded for vertical deceleration. The combination of this and the rapid decay of the rotor makes idle power practice autorotations impossible.
The model is advertised as being able to simulate Vortex Ring State, Translating tendency, Transverse flow effect as well as Loss of tail rotor effectiveness (LTE). Translating tendency is very difficult to detect in this model. I tested it over the course of four days and I really couldn’t detect any real tendency for the helicopter to drift in the direction of tail rotor thrust when in a hover. I did find, when looking at the fuel and Payload menu in FSX, the Center of gravity is noticeably offset to the right, which might be the developer’s way of simulating the aircrafts hover attitude, or induce drift. This effect very well may be there, I just didn’t notice it. To be fair, I don’t notice it much in real life either, other than the hover attitude of the aircraft. This is something that the pilot always compensates for without thinking.
Transverse flow is also something that I didn’t really see demonstrated in this model. I did several limited power takeoffs, with the collective set to IGE hover power. Easing the cyclic forward to see if there were any tendencies of the aircraft to roll, and saw none. But, again, to be fair to the developer, most reasonably well trained real world pilots don’t notice the effects of transverse flow in real life helicopters because their right arm naturally anticipates and corrects for the change in attitude automatically without thinking about it. So no real points lost there in my opinion.
If you’re not familiar with LTE, here’s a quick overview.
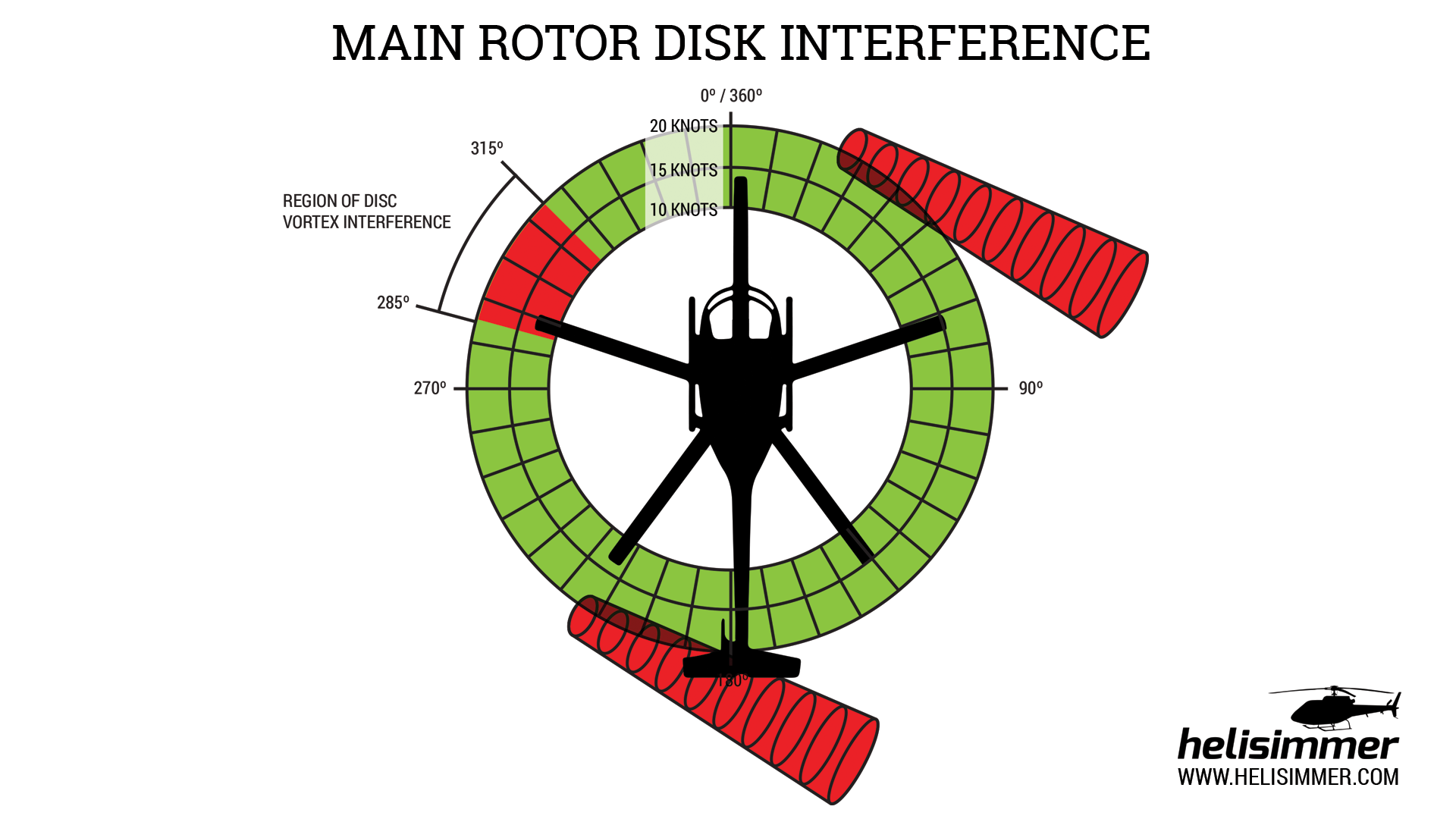
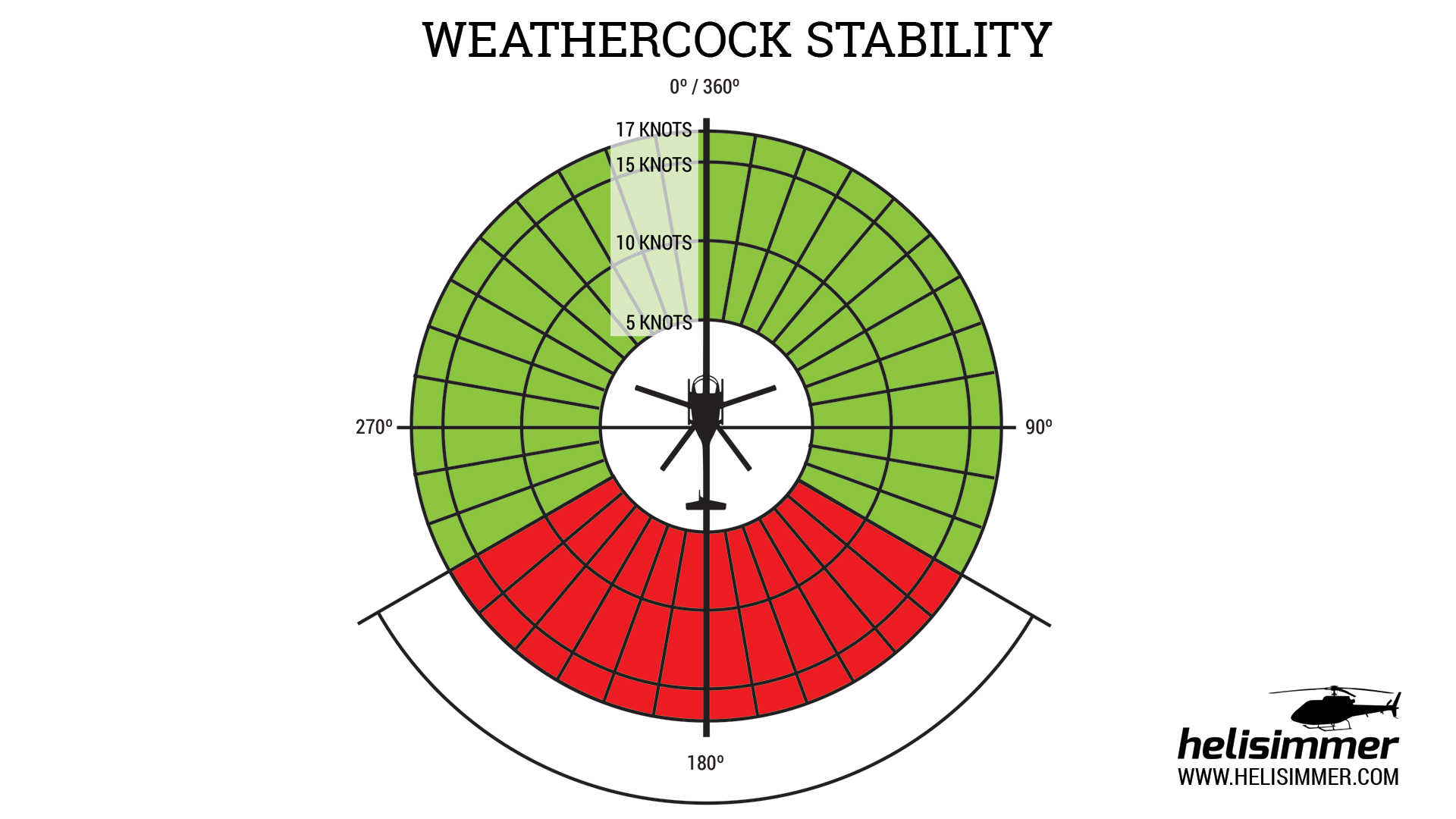
There are basically 3 types of LTE that a helicopter will get into: main rotor disk interference, weathercock stability, and tail rotor vortex ring state. Any helicopter with a tail rotor is susceptible to LTE, however small light helicopters are more vulnerable because they typically have smaller tail rotors mounted on shorter tail booms. When a helicopter experiences LTE there is a sudden and uncontrolled Yaw in the direction opposite of the main rotor rotation.
Main rotor disk interference is basically when the vortices of the main rotor get blown into the tail rotor by the wind. This typically occurs when the helicopter is hovering with a left or right quartering head wind. So in the case of the Gazelle, it would require a right quartering head wind, opposite of the diagram below.
Weathercock stability is basically when the aircraft tries to weathervane into the wind. A helicopter is most vulnerable to this when hovering with a tail wind.
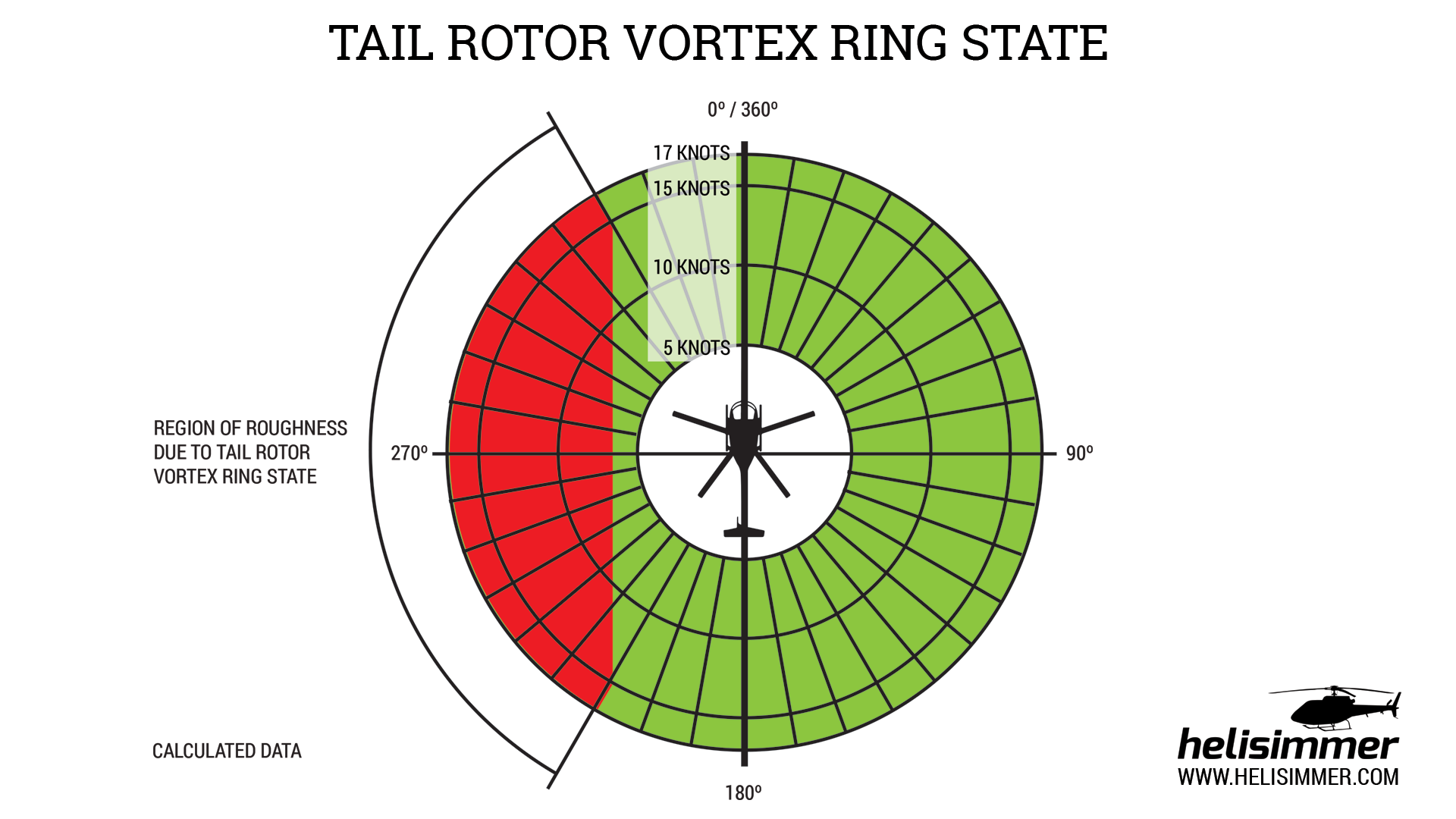
Tail rotor vortex ring state is exactly what it sounds like. When at low airspeed, with a strong crosswind, the tail rotor can develop VRS on its own. Since the tail is mounted perpendicular to the ground, a strong crosswind could have the same effect as a high rate of decent for the main rotor. And again, for the Gazelle, it would be opposite of the diagram because of the opposite rotation of the rotor system.
Since LTE was an advertised point for this model, I was really curious as to how it would be presented, and how close to the LTE parameters it would manifest. I set up deliberate wind scenarios that were designed to induce each type of LTE. I then hovered around both IGE and OGE, and did a few low speed steep approaches. Try as I might, I could not induce any sort of LTE with this model, with the exception of weathercock stability with what I would call an extreme tail wind. With a strong enough tailwind, any FSX helicopter will suddenly yaw so I have a hard time giving credit for that one. Some argue that the Fenestron is not as susceptible to LTE. I haven’t seen any academic evidence of this in any research I’ve done.
Another feature I was unable to duplicate was vortex ring state. I tried for several nights to get this aircraft into fully formed vortex ring state, even taking it to high density altitudes, with no luck. Each time I pulled up on the collective after developing a rate of decent far greater than 300fpm, the aircrafts rate of decent slowed to a hover. Oddly enough, the only time I was about to induce any sort of un-commanded yaw in this model was during my attempts at entering VRS. When in a vertical descent, the nose will suddenly yaw through 180 degrees to the right. Even though this resembles LTE, there are a few reasons that it isn’t. First, the helicopter yaws the wrong direction for an aircraft that has a clockwise spinning main rotor system. Second, in this test, the winds were set to zero, so there would be no chance to develop weathercock stability, main rotor interference, or tail rotor VRS.
[Editor's note: at the time of the review, 3 different people tried the Gazelle for this review, as to compare results. As of October 2017, some more tests were performed in this model, by myself, and the results were different. VRS was no longer recoverable with collective only for me. LTE is still something we could not get into but that could be because the fenestron anti-torque system is less prone to it.]






