Installation
Like all X-plane aircraft, Installation is extremely easy. After the initial download, it’s just a matter of placing the B407 into your X-Plane 10 helicopter directory.
First look
The DreamFoil B407 has been around for a while now, and it’s likely one of the most popular helicopter add-ons for X-plane. Now, if you are an avid FSX user like I was, the DreamFoil B407 will look very familiar. Its basic visual model is virtually identical to the Milviz Bell 407 that was released some time before. DreamFoil built on this basic model and brought it to the wonderfully permissive environment that is X-plane 10.

Milviz is known for their stunning visual models, and this translated very well into X-plane. Dream foil took this model a few steps further without degrading the quality of the original 3D model. If you’re an FSX user of the Milviz product, you have the option to configure the helicopters various accessories, via the Menu Manager, which is a separate program. In X-plane 10 DreamFoil was able to give the user the ability to add or remove accessories to the air Frame on the fly form an in game menu.
DreamFoil retained some of the options from the Milviz model, such as floats, Cineflex camera and the Frahm dampener. It must be noted however that these common options have been remodeled for the X-plane version. DreamFoil also added a few more options to their X-plane model, like the large window high visibility pilot’s doors and low skid equipped helicopter




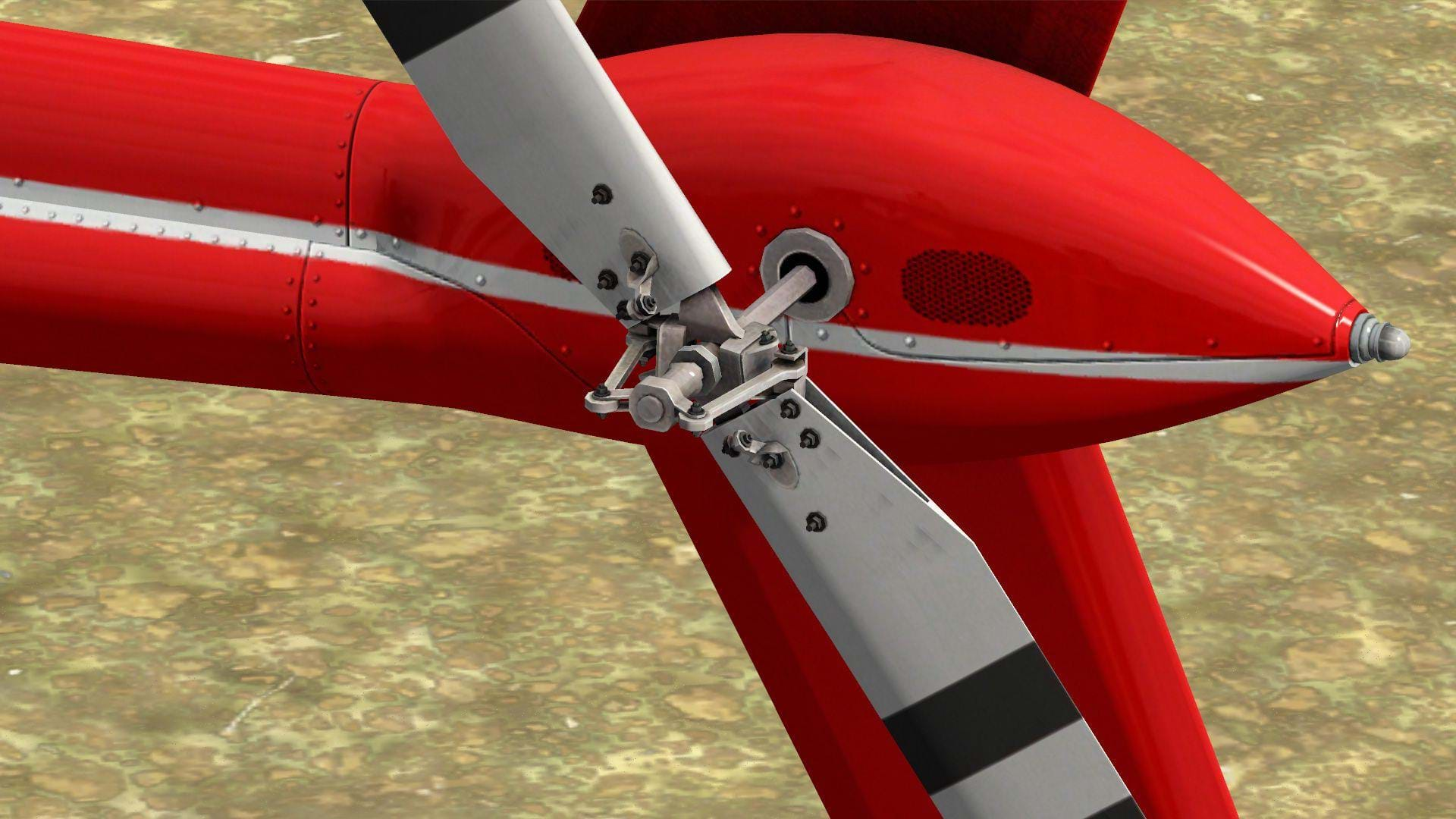
The main and tail rotor systems are modeled in fantastic detail. The main rotor is especially detailed without the Frahm dampener installed. Individual nuts and bolts can be seen holding the rotor head and main rotor shaft together.

The interior model is just as exquisite as it’s FSX counterpart.


Textures
The textures of this model are pretty good. This model uses the same paint kit as the MilViz B407. The textures have the same amount of extraordinary detail. You also have the ability, via the models built in menu to change paint schemes on the fly within the sim, without going into the Aircraft selection menu and reloading the aircraft.
Sounds
This is one of the areas where the X-plane 10 B407 really stands out. It has the benefit of using DreamFoil’s DreamEngine plug in. This makes a huge difference in your sense of immersion in this model. And of course, the joy of this is in the details. For example, virtually removing your headset causes a very distinct increase in cockpit noise. Engine and Rotor RPM changes are also very well done inside and out.
The external sounds are very close to what I’ve heard from real life Bell 407’s which leads me to believe, very well engineered or were recorded from an actual aircraft.
Systems
DreamFoils systems modeling are top notch. It can be argued that it’s the standard to which every other X-plane helicopter is compared to. All of the switches and circuit breakers are clickable, and each has a reasonable effect of the operation of the aircraft. For example, if you pull the fuel quantity or pressure circuit breakers, you can expect to see your fuel gauge go blank on the instrument panel. If you click on the air conditioner, you can expect to hear air blowing out of the vents, another benefit of the DreamEngine sound plug-in.
In real life the Bell 407 really brought the American light single engine helicopter into the present, on par with its European built counter parts. The Inclusion of a Full Authority Digital Engine Control (FADEC) system made starting a turbine powered helicopter much simpler and safer (for the engine) than it once was. DreamFoil’s FADEC backed engine start is just as easy as it is in the real aircraft. Also, pulling the circuit FADEC breakers on the over head panel will cause the expected FADEC failure that the user will have to deal with using manual throttle.
The model comes with a 24 page manual, as well as a checklist in a kneeboard style format which provides some help in understanding the aircrafts systems.
Flight Dynamics
I’m always careful when I discuss the flight dynamics of a home use, desktop flight simulator, mostly because of all of the variables that can go into what makes something realistic. However, I really do like the way this model handles in X-plane. Does it fly like the real Bell 407? Probably not, but it is modeled well enough that it makes me feel like I’m actually flying a helicopter of this size. It’s about as close to realistic as I’ve found in any other flight simulator available for home use.
Hovering the DreamFoil Bell 407 can present a challenge to new users. The Bell 407 is a very responsive helicopter. Without any adjustments to the stability it requires a pretty well developed control touch to be able to perform low speed/hovering maneuvers. DreamFoil did their best to capture this, and they were largely successful in their efforts.
One of the nice things about this model is that it replicates the 407’s nose high hover attitude pretty well. This is apparent when you pick the aircraft up to a hover it lifts off from the ground nose first. At a stable hover with no winds, it’s also pretty easy to see that this aircraft tends to hang 2 to 3 degrees left side low, indicating that translating tendency is also in effect.


For people who haven’t quite developed that control touch, or are new to helicopters, DreamFoil added a customizable stability augmentation system. This system isn’t present on the actual Bell 407 as far as I know, but it’s a smart move for DreamFoil to add. This allows virtual pilots of all skill levels to enjoy this model. It also helps quite a bit if you’re using a set of non helicopter specific flight controls. Don’t have foot pedals? No problem, just increase the stability of the yaw axis to lower the work load on your wrist. It’s a great idea that allows the flight model to be flexible at adapt to all skill/equipment levels. Those with high end desktop sticks and throttles or those with Helicopter specific floor mounted flight controls will really appreciate the control response you get for small control inputs.

The DreamFoil Bell 407 has a very good aerodynamic model for its rotor system. RPM management during autorotation demands more of the pilot’s attention than your standard FS model. It also has a realistic tendency to over speed during the flare/deceleration of an autorotation which is pretty close to what I would expect from an aircraft with a low inertia rotor system like this.

One thing about the DreamFoil Flight characteristics I found very interesting that I hadn’t seen modeled in any other flight simulator is effect of transient torque. If you’ve been flying for a while, real world or simulator, and have never heard of transient torque, that’s not surprising. It’s not really discussed in the civilian sector of aviation all that often, and with good reason. Not all helicopters experience it, and most private or commercial helicopter operations avoid doing maneuvers where the effects of transient torque would be apparent.
So what is transient Torque? In a nut shell, when a pilot of a helicopter performs a large rapid uncompensated left or right cyclic application, you can expect to see the torque increase or decrease respectively. Now, when I say uncompensated, I mean the collective is not moved. So if the pilot puts the aircraft in a sharp left hand bank, and holds the collective pitch in place, you can expect to see an equally rapid torque increase. And if the pilot were to do the same to the right, torque would decrease. Why is this? Well, it’s got a lot to do with blade pitch, gyroscopic precession and the FADEC, governor or whatever engine power management system the aircraft is equipped with.
So let’s look at the left turn. When a pilot wants the helicopter does a rapid left bank, the blade pitch increases over the tail, the effect is greatest 90 degrees later in the direction of rotation. This puts a high angle of incidence on the blade that’s traveling into the relative wind, therefore increasing drag on the rotor system. This increase in drag tends to make the rotor slow down, and this is where an aircrafts engine governing kicks in. The governor, or in this case the FADEC, either senses this slow down, or anticipates it, and increases fuel flow to the engine to help maintain the rotor RPM. This sudden increase in fuel increases power, thus increasing the torque which is seen on the torque gauge. The opposite is true for a right turn, the advancing blades angle of incidence is reduced going into the relative wind. Sensing or anticipating the increase in rotor RPM due to the sudden loss of drag, fuel flow is reduced by the FADEC and the torque drops.
If a helicopter isn’t equipped with a digital governor, FADEC or some other high fidelity power management system, you likely won’t see a torque spike or drop, the rotor will just simply slow down or speed up for a second. I’m not sure if this effect is as prevalent in the actual Bell 407, but I did think it was great to see this aerodynamic/mechanical effect brought to a flight simulator.


Now, this flight model isn’t perfect. There are some flaws with the DreamFoil 407 that seem to defy physics. For example, a 150ft AGL, with less than 20 knots of airspeed, you can roll this model 360 degrees, and only lose about 75 ft in altitude. The only indication that you’ll get is a temporary engine out indication, but the engine functions are normal. I discovered this phenomenon completely by accident, as this isn’t something I would normally do during a flight, sim or real world. My 75lb dog decided the best place to hide from the thunderstorm outside was between my right leg and my cyclic. This caused the ship to roll all the way around before I had a chance to correct it. The very fact that I was able to correct this was puzzling to me and, in the name of good science decided to do it again, this time from about 200ft AGL. I was able to recover the aircraft once again with only the temporary engine out warning. In the series of screen shots below, you can see what I’m talking about. Note the radar altimeter and airspeed indications.









The same phenomena is present when going full forward cyclic or full aft cyclic. You can do a full outside loop and only loose about 50ft of altitude.
I suspect this Airwolf like super agility is a byproduct of the cyclic authority necessary to give this model its responsiveness at a hover and in normal flight. This theory is supported by the fact that I could not repeat this phenomenon with the stability turned up to 100% in all axis. I’m not a developer and by no means a programming wiz, so this is just my speculation. Either way, it’s not something anyone would do in normal flight unless you’re Chuck Aaron, or on the Apache display team of the Royal Netherlands Airforce. Because a below ETL cyclic roll is an absurd thing to do in a helicopter, it can be argued that it’s pretty nitpicky to count this as a deficiency in the flight modeling. But even so, rolling a helicopter through 180 degrees without any loss of altitude is something you’ll typically only see a reverse pitch RC helicopter do.
All that being said, I really don’t think that it’s a huge deal this model has this odd behavior. I’ve been flying helicopters in the real world for 16 years, and have yet to go full throw in any direction on the cyclic. Even at pitch angles up to 60 degrees, and bank angles of 120 degrees. Since I fly the simulator in a similar fashion, I’ll likely never come across this during normal flight. This departure from known physics is interesting, but largely transparent in my opinion.






