There’s a bit of a running joke within the industry about twin-engined helicopters: “the good engine takes the bad engine to the accident site”. This anecdote never really made much sense to me while I was flying single-engined helicopters. In late 2018, I was hired for my first twin-engined gig and it was going to be in the Bo 105 initially and moving onto bigger things later. After a couple of hours in the 105, the anecdote suddenly made sense.
After the second world war, the German aerospace industry largely escaped to other parts of the world with big players Messerschmitt and Dornier to Spain and Kurt Tank to Argentina. A former engineer with Messerschmitt, Ludwig Bolkow, decided to stay in Germany, however.
Bolkow had worked on Messerschmitt’s BF109 and was one of the brains behind the revolutionary aerodynamics of the Me262 jet. During the 50s, Bolkow headed his own aerospace company that specialized in unique technologies including an ultralight helicopter that debuted at the 1959 Paris Airshow. Bolkow was merged to create Messerschmitt-Bolkow-Blohm (shortened to MBB) and in 1964 work started on a light twin-engined helicopter that would go on to become one of the most famous in the world.

Above: Bo 105 Prototype two first flight February 1967. Airbus Photograph
The second prototype of the BO 105 V2 first flew on the 16th of February, 1967. Interestingly, the first prototype, the Bo 105 V1, used a Westland Scout main rotor head. However, this aircraft was destroyed before it could be flown. The second prototype flew with the Bolkow hingeless rotor head and was powered (or underpowered as the case may be) by two Allison 250 C18s.
In the initial production run, MBB was producing around one helicopter a week and is believed to be the first helicopter to achieve worldwide sales that wasn’t produced for the military. Due to the government development work that MBB was involved with, technologies such as the hingeless rotor head and GRP (Glass fiber Reinforced Plastic) blades were developed well before the 105 flew.

Above: Prototype Four retired to the Deutsches Museum 2010. Dave Bates Photograph
The 105 invariably found its way into the military however and in the late 1970s, the German Army placed orders for versions to be used as observation and anti-tank platforms. The public’s first real glimpse of the capabilities of the aircraft was at the hands of the MBB test pilot Siegfried Hoffmann and this has been immortalized in a now-famous YouTube video .
It would be silly to list all of the government agencies that have operated the 105 over the years because the aircraft sold like crazy through the 1970s and 1980s. The aircraft continuously improved throughout its production line and again, it’s simply not practical to list ALL of the 105 variants but the main civilian versions comprised of the A, C, CB, CBS, DBS, LS A1, and LS A3. All of these changes improved the design in some particular areas, mostly providing more power or simply more capability.
My initial introduction to the type was flying in Papua New Guinea. The company has four flying Bo 105s with two CBS4s, a CBS5, and a DBS4.
The flying is predominantly what the 105 became best known for and that’s in the EMS role. I found the 105 to be a fairly capable machine in most instances however, the old girl is really showing her age now and jumping from the BK 117 back into the 105, one really appreciates how much aircraft design and cockpit ergonomics have improved.
When you’re by yourself in a 105, it’s a little like a Hughes 500 but when you’ve got four pax on board, a boot load of cargo, and a bit of fuel, you can get into trouble really quickly. Despite its reputation, the 105 cannot be considered fast or overly powerful when it is in a normal working configuration and as a pilot, you must take extreme care at high weights and altitudes.
Flying a twin-engined machine is all about having an escape route on one engine and in the 105 at operational weights, there are quite a number of times where if you lose an engine, you will have an accident. It’s just very marginal sometimes, even if you’re at an appropriate weight for the altitude.

Above: ZK-HSJ 105 DBS4, Kensington Park, New Zealand, 2004. Dave Bates Photograph
OK, let’s talk about the elephant in the room here. The BO 105 is NOT an aerobatic machine. Period. Aerobatics are prohibited in the Rotorcraft Flight Manual, and I consider it to be aerobatic in the same way that the Hughes 500 is aerobatic.
In other words, it is aerobatic at the right weights but you really shouldn’t be doing it. The so-called ‘Red Bull’ helicopters piloted by Chuck Aaron et al are lightened, slightly modified, and operating on what I think is a ‘Restricted’ type certificate. The performance of these aircraft is not that of a normal, working 105.
The JRX BO 105 DBS4
JRX approached me for information on the 105 after I was able to provide a little help with their Gazelle release.
Ultimately, modeling the DBS4 that I did my type rating on and had flown the most was decided. The DBS4 was a version of the CBS4 that was certified in the UK for the offshore oil and gas market. The aircraft features a full IFR kit, dual inverters, provisions for pop-out floats and a fuel dump system, radar alt, and a number of other small features and systems that make it different from other 105s.
Full disclosure: I was the chief test pilot on this project. However, my aim here is to review the product to the same standards that I would for any other product. A number of the issues that will be pointed out here are already in the pipeline for an update that will probably closely follow this review. The product as of the date this article is being published is a beta release although it is fully flyable.
Download and Installation
The compressed file totaling 997MB is available exclusively from the x-plane.org store and when decompressed into the ‘aircraft’ folder in XP, takes up 2.46GB of space. Normal helicopter setup is recommended for controls and throttle is via the wing sweep axis (more on this later).
Model and Textures
Being a current 105 pilot, my eyes and brain are pretty well-tuned to the look of the aircraft. I have to say, JRX have done very well with regard to the modeling and textures



The model represents a late DBS4 much the same as the aircraft that I am familiar with although the aerial fit is naturally different. JRX has also managed to include some of the features that are unique to the DBS version. The model is crisp and clean, and the textures make it very realistic.




As with most releases, however, it’s not perfect. Now, I know this aircraft very well so there are things that I will pick up that people who aren’t familiar with it will not. The same can be said for almost any sim model though.
The first thing in this regard is the use of the Type One rotor blades. These were used on a number of earlier 105s up to the CBS5 and they can be fitted to the DBS4 however they are not strictly correct for the factory fit-out.
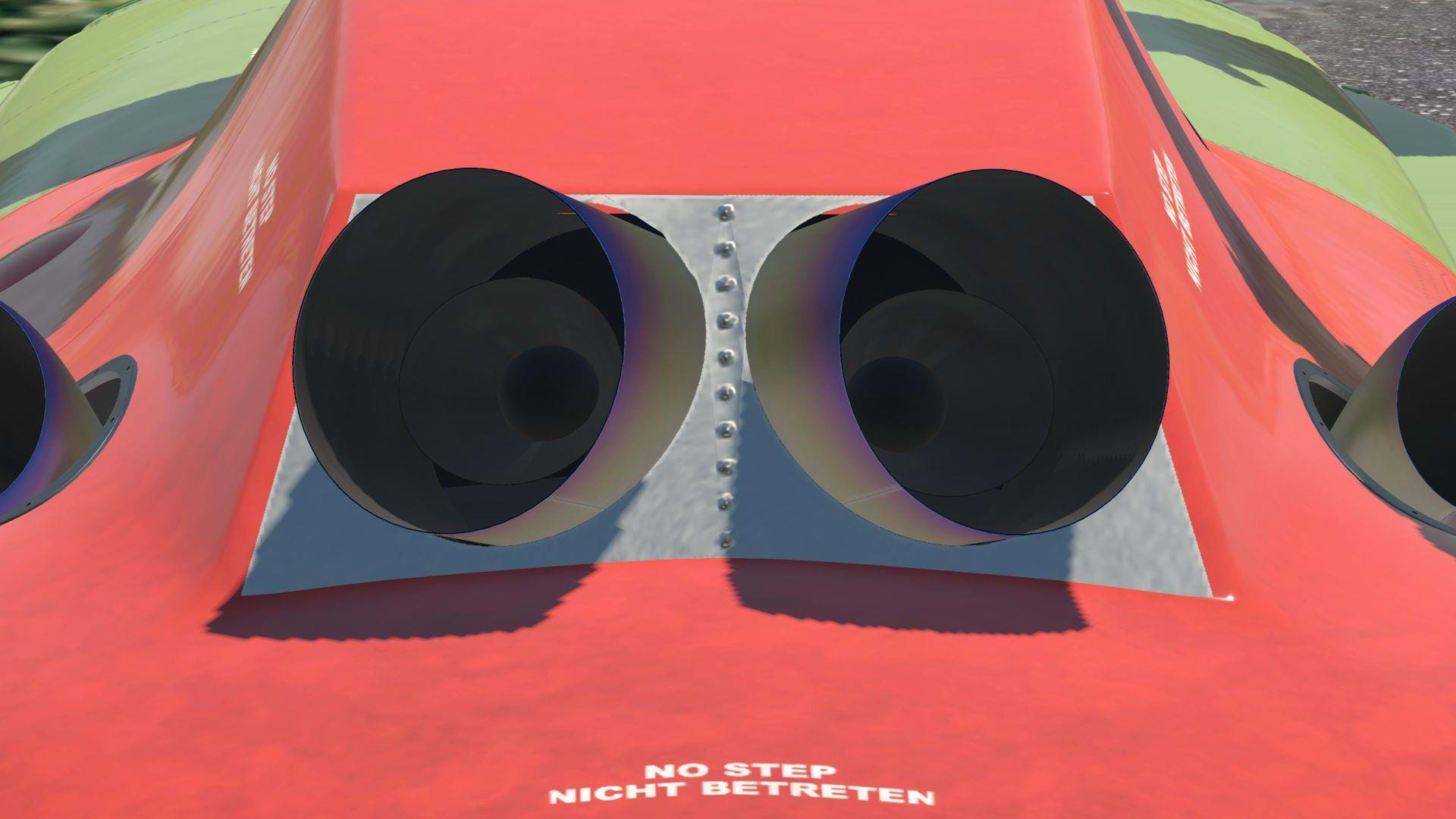
Staying up top, the rotor blade cuffs and weights aren’t quite right either with the cuffs being a bit too chunky and the weights being a little misshapen. To be honest, it doesn’t really take away from the look of the aircraft too much. One of the things that we really struggled to get right is the two center exhausts. The 105s two engines show, up until the LS, four separate exhausts on the cowling. The outer two are much like that of a Jetranger. The two in the middle are housed inside larger ‘sleeves’ for a ram air effect.
The angle of these sleeves isn’t right yet although if you are unaware of the exact layout, you’d probably never notice. I think this will be corrected at some stage in the future. The characteristic control linkages that connect onto the mixing unit attached to the mast are all at funny angles too. On the real aircraft, they are more or less straight up and down. As above, I think this will be corrected in the future.



Moving inside reveals a very busy interior on this bird. Given that the aircraft was meant for a two-pilot IFR type operation, the panel features two sets of primary flight instruments and a large navigation suite. In the real aircraft, we have a Garmin touch screen GPS (not sure of the exact model) mounted on the left side of the panel.
JRX has chosen to move the GPS down onto the center pedestal behind the Nav radios. Not the ideal place for it but then again, the usual AviTab and GTN750 integration is included if you have to have a map in front of you. I’ll deep dive into the systems later but virtually everything in the cockpit works as it should. A small note here that some of the military stuff has crept into the cockpit in terms of the seats. The civilian seats have a fiberglass cover over the back, but you aren’t going to notice that while flying. The cyclic lock is not present either. These are supposed to have the clip removed so that they don’t work as part of an AD from Airbus. In this case, the whole thing has been removed.


The animation of the main and tail rotor are well done and while the original releases had issues coping with XPs lighting system, V1.3 looks and performs very well.
The lighting effects inside and out are really very nice and actually, unusually, make me want to go flying at night. The lighting system relies on the ‘spill’ lighting within X-Plane, so the “Visual Effects” have to be set to High.
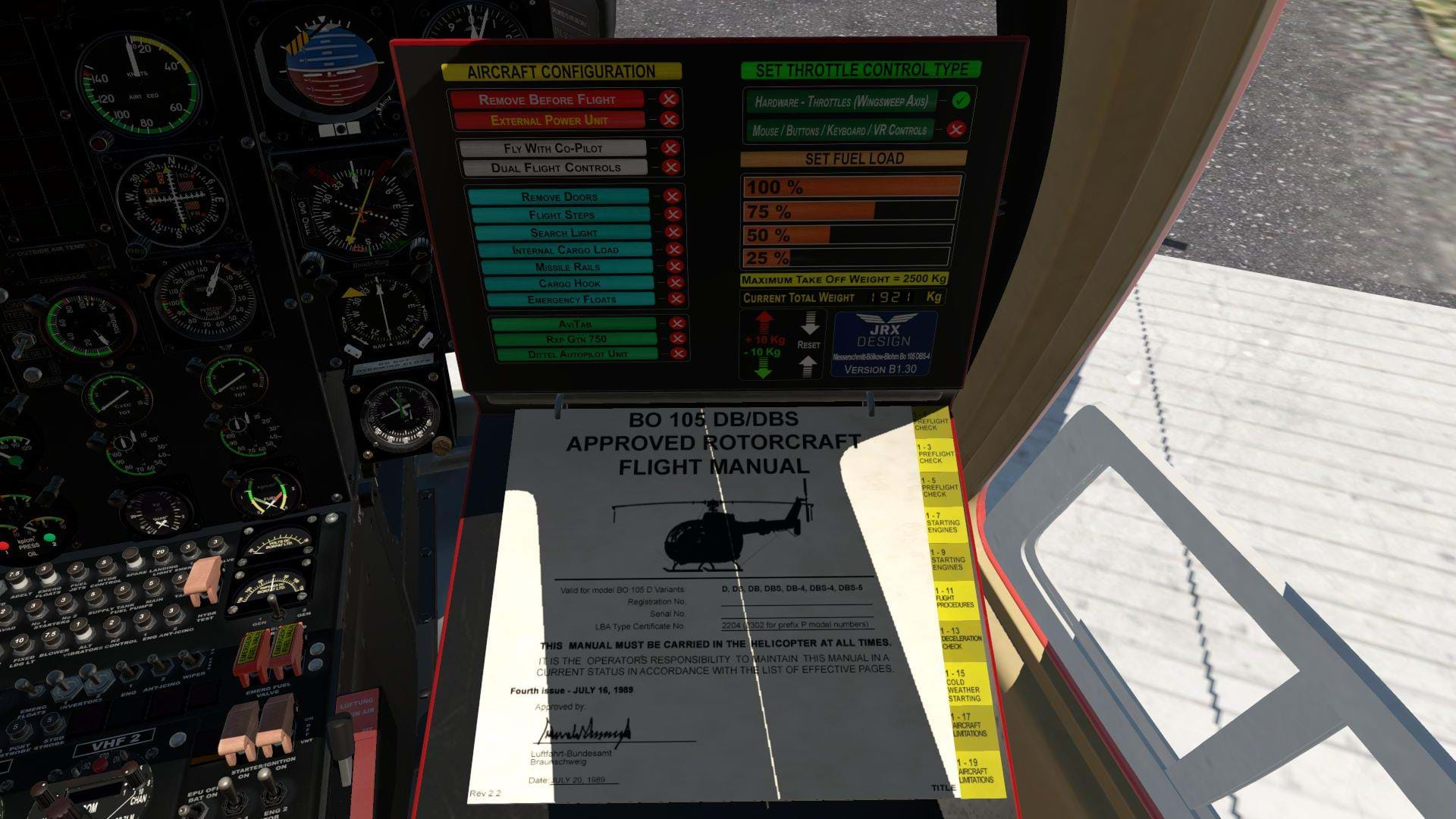
There are a number of different options included in the model. The usual flags and blanks, a very organized ground cart complete with crew, cargo loads, cargo hook, pop-out floats… there is a lot of customizable stuff in here and it all changes the weight of the aircraft.


These things are all selectable via the ring binder on the top of the instrument panel combing. The binder also contains the Rotorcraft Flight Manual.
Overall, it’s very positive. Yes, there are a number of things that aren’t quite right in the model but only somebody who pretty much looks at the real thing every day will notice them. A lot of work has gone into the model and texturing here, and it really shows.
Systems
The Bo 105 is not a particularly complex aircraft. The fuel and hydraulic system are the only things that are more or less unique to the model. By doing the DBS version of the helicopter, the systems modeling has become a lot more complex.
JRX has really risen to the challenge of modeling possibly the most complex version of the 105 in the civilian world. Two main things are not complete in the systems right now – the fuel and hydraulic test systems.
The fuel system is actually almost the same system that was fitted to the BK 117 and then later the EC135. Fuel is stored in the main tank which is connected to a single supply tank at the front of the aircraft (the BK and EC135 have two supply tanks). The engines draw their fuel by the engine-driven pump from the supply tank. The supply tank only holds 74Kg (around 93 liters or 205 pounds) so there isn’t much in there to keep them going.
There are two pumps that transfer fuel from the main tank to the supply tank and under normal operations, these pumps are always running to keep the supply tank topped up. If you forget to turn the pumps on, you’ll have a low fuel warning quite quickly.
Right now, in the JRX version, the pumps aren’t actually modelled. The fuel drains in the correct order but it’s like having the pumps on all of the time. This is on the list of things to implement and is already being looked at.
The hydraulic system is single-redundant with two separate hydraulic systems running off of one pump. The systems have their own individual supply and automatically switch over when pressure is lost in one system. There is also a cut-out for a servo failure. This is indicated by an HYD BLOCK light on the annunciator panel. There is a pre-flight test for the hydraulic system that involves moving the controls to get the light to activate and then resetting it for the next movement. Right now, the Hydraulic Reset switch isn’t functional, however, as above it is being worked on.
One of the little quirks about the DBS is that the pilot’s Artificial Horizon (AH) is powered directly off of the battery. There is a ‘Horizon Power’ switch at the top of the panel that powers the gyro. In the real aircraft, this usually takes around four minutes to spin up. On the sim version, the gyro powers up quicker but still realistically and otherwise works as the real thing does. Due to the way X-Plane handles electrical systems though, you will see the AH move during start-up.
The 105s Mast Moment indicator works and works pretty well. Due to the fully rigid head on the 105, an indication of how much cyclic is being applied on the ground is needed to avoid stressing the mast. A red light staying on means that an engineering inspection is required. There is a little tweak that needs to be made to the conditions that the light comes on is already on the list for the update but as of right now, the gauge works perfectly. In fact, it works better than most of the real ones.
The way that JRX has modeled the start is quite good. The DBS has a latched starter as opposed to some other 105s where you have to hold the starter down. The engine starts in the same way that any other model 250 engine does and the throttles on the roof have idle releases.
JRXs system is that with the throttle in the cut-off you simply click the idle release to introduce fuel. It all works very well. The only caveat to this is that the throttles have to be right back on the stops for the idle releases to work. If you’ve been playing around with dragging the throttles then they may not work.
JRX has managed to translate my probably confusing information on the electrical setup of the DBS into an accurate representation. There are items that are connected on a ‘hot’ bus, essential and a non-essential bus as well as AC inverters for navigation instrumentation. There isn’t really a lot to say here except that all of the systems are on the correct bus, and everything works as it should.
The HSI that is fitted to this aircraft is enclosed. Meaning that it can only be electrically adjusted. When power is supplied to the HSI from one of the inverters, it will ‘drive’ itself to the correct heading. It does this in the sim, but JRX is working to improve the start-up animations.
I could write an article about the electrical system and its modeling alone, but I’ll just cover off one or two notable things here. The engine RPM trimmer works but as with most models using the wing sweep function, the changes are taken out again by the system.
Along with this, on the real aircraft, the throttles are moved to the full forward position and left there. Within X-Plane though, the throttles act more like a piston-engined helicopter and are constantly moving. This is an unfortunate by-product of having to use the wing sweep method for throttle control. In all fairness though, they’re in such a position that they are usually outside of my field of view, and I don’t notice it. There is a plan to move it back to X-Plane’s throttle control in an upcoming update.
JRX has gone all out and modeled all but a couple of the circuit breakers on the pretty impressive panel and certainly something that I wouldn’t have expected. The lower circuit breaker panel beneath the collective is present but not modeled yet and given its location and what’s on it, that’s quite alright.
The warning horn system is modeled, though, with the horn and light activating with, mostly, the correct triggers. However, the horn mute button on the cyclic acts as an on/off switch as opposed to a mute. Hopefully, this can be investigated at some point in the future.
Given the complexity of the electrical system that is being modeled, JRX has done an outstanding job getting this far. It’s not quite finished though, and we can look forward to new features and some nuance in the way that the gauges move in the coming updates.
Sounds
Probably one of the hardest things to get right in any addon, JRX had a little bit of an uphill battle here. Given the decreasing number of 105s flying in the world (in fact, Airbus is going to discontinue support in the future), finding aircraft to record sounds off is increasingly difficult.
The sounds for this 105 have come from within the community. I spent a lot of time on the ramp at work attempting to record the sounds of the aircraft in a commercial environment with people around, generators running and car horns in the background. JRX has managed to combine what I was able to record with some other sources to put together a reasonably good sound set
There are a couple of noticeable loops during start-up and venting but it’s not too bad. The ‘growl’ that the 105 gets from the blade slap in turns is present and it sounds great, quite difficult to get right for sure as anybody who is in the development business will attest to. Everything in the cockpit has sounds associated with it even down to the sound of you having to stretch the collective lock to engage it.
Most of the sounds are recorded from a 105 and it’s good to see that developers are starting to realize that this stuff should be done. The sounds change when there is a door open or when the little sliding window on the door is open and is quite good at providing some atmosphere to the sim.
There isn’t really a lot else to say here. The sound is pretty spot-on and if we can take care of a couple of loops in the start-up sounds then it’ll be perfect.
Flight Dynamics
When I started to fly the 105, I had just come off nearly 18 months of flying the 500 every day. The 105 was a little scary, to begin with just because of the complicated (next to the 500) electrical and fuel systems.
We had a really good check and training guy who whipped me into shape on operational matters. What I didn’t have too many issues with is actually flying the aircraft. Although it has hydraulically boosted flight controls, the feel of the aircraft isn’t too dissimilar to a 500 and has the same style of trim system.
I’m going to say this again here. The 105 is not an aerobatic aircraft and early on, the decision was made not to pursue aerobatic flight characteristics within the sim.
The 105 is most definitely a first-generation twin-engine helicopter and the anecdote about the good engine taking the bad engine to the accident site definitely applies to a heavy 105 at altitude.
I felt that this was an important thing to try to replicate with this model as a lot of helicopters in sims don’t. The other thing that you notice when you go flying in a 105 is that it’s not the quickest machine out there. It has a VnE of 145kts (decreasing with altitude), but you’ll never get anywhere near that in straight and level flight. We plan on 110kts and hope for better but quite often, that’s what it evens out to.
At MAUW of 2500kg in the sim, the aircraft feels a little sluggish as does the real thing which is pleasing. The 105 has a pretty amazing tail rotor though and you don’t use a lot of pedal even when you’re pulling 86% torque. It’s pretty well dialed in within the sim, but I feel that X-Plane isn’t very good at measuring tail rotor effectiveness so it’s always a trade-off. Picking JRX’s 105 up into the hover at 2,500kg and you’re not pushing the pedal a long way forward but it still feels like a heavy aircraft.
CAT A VTOL ops produce about the performance that I’d expect at MAUW but you better watch out if it’s a hot day. Going above 3000ft, the CAT A performance drops off but not quite at the rate of the real thing.
The climb and cruise performance are pretty much spot on although it’s probably a little bit quick at lighter weights. Despite this, it is a really fantastic flight model. My only thing right now is that the performance above 8500ft is a little broken although hopefully only temporarily. Given JRXs insane ability to diagnose and fix problems, I’d expect this to be cured soon.
Earlier versions of the JRX 105 had some issues with stability and torque fluctuations. These have all now been cured although the use of the wing sweep function for throttle will produce some torque fluctuations and the only thing that is left to do is tweak some of the TOT and N1 variables to match real-world numbers. OEI performance is pretty much spot on in terms of torque and I think it gives a realistic impression of a 105 on one engine.


Autorotations, although not often performed in a twin next to a single, are well-tuned and perfectly controllable. The only thing that I can see that isn’t quite real-world is the descent rate is a bit low, but it doesn’t detract from the experience. Autos are hard to tune in X-Plane and if you look at some of the other helicopters out there, JRX (and one or two others) are leading the pack here.
There are a couple of things that real 105s do that this version doesn’t. The first is that at power settings between 40 and 60% torque in a descent, the aircraft gets a wobble on. A sort of slow oscillation about the yaw and roll axis.
The other thing that is quite famous is the 105s tendency to roll right when in a high-power right turn. This famously led to MBB test pilot Siegfried Hoffmann crashing and killing himself performing a demonstration. The reason for this quirk is because the mixing unit mounting is offset on the mast, meaning that if you pull collective, it introduces right roll too. Operationally day-to-day, you don’t notice it at all but maneuvering close to the ground, it can bite you. These two characteristics by no means define flying a 105 but maybe one day it’ll be nice to have them replicated here.
Obviously, different users’ experiences will vary depending on their control setups. My X-56 with modified spring and 0% stab augmentation on the pitch and roll axis within the sim makes the aircraft feel about right.
Overall, I’m pretty happy with how the flight model on this turned out and I think that we have a realistic interpretation of how the 105 flies. It would be neat to include a couple of the little tricks that the 105 has in its flight characteristics at some stage but right now, it’s realistic and it’s fun.
Miscellaneous
Ring Binder
On top of the instrument panel combing, there is a binder that is used as the method for selecting different options for the model including how the throttles are controlled (hardware axis or mouse/VR controllers, etc).
This also houses the flight reference cards for your checklists. It’s a very good system.
Vibration
One characteristic of the rigid rotor head on the 105 (and BK117) is that all of the vibration associated with induced drag is transferred through the head and into the fuselage. The 105 gives quite a rough ride through low speeds. This is very difficult to replicate but JRX has done a pretty good job of modeling the whole cockpit moving through certain airspeeds. I don’t see how it could be done better right now. This is fully customizable by editing a file within the addon. See the familiarisation videos from JRX for information.
Liveries
JRX has included 25 liveries for the 105. Most are real machines, and all are of very high quality.
Summary
Right off the back of their successful Gazelle release, JRX tackled a decidedly more complex helicopter and I’m sure there were times where they were cursing my name for even putting the idea out there.
The release at this time is a beta so we can expect it to improve over the coming months but even right now, it is a very good representation of the real aircraft. The continuing improvement and problem solving that JRX is doing means that this addon is only going to get better.
Another thing that I should mention here is the support provided by JRX on the X-Plane.org forums is top-notch and problems are solved sometimes in minutes or they are investigated and fixed at the next update. JRX’s 105 is about as close as you are going to get to the real thing without doing what I did and spending time actually flying one in one of the armpits of the world.






