Introduction
My interest in Russian helicopters has always been a professional one. Most U.S. and other NATO member military pilots make it a point to get to know Russian made aircraft and their capabilities, as Russia has sold many of their aircraft to countries that are unfriendly to the West. But it hasn’t been all adversarial. I’ve gotten to know Mil helicopters like the Mi-17 and Mi-24/35 through working with allied countries that operate the type.
So a few weeks ago I became curious about the KA-50. The Ka-50 is one of the original DCS modules and has been around a long time. At first, I had very little interest in it, because I didn’t really have a place in my sim routine for dedicated scout/attack helicopter. But, thanks to the UH-1H, and the SA342 my curiosity about the Ka-50 grew. Because of this models age, a lot of you out there who may be reading this are already very familiar with this DCS module, and most assuredly know more about it than I do. So you may read things you disagree with, but I hope it may give you a new perspective.
DCS has a really good reputation for their realism. Being an Attack helicopter pilot by trade, I thought I’d take their only model of a purpose built weapons platform and see how they did. It’s important to know upfront that when it comes to Attack helicopters, I’m very biased, however, I’m not going to be comparing this model with the AH-64 directly. But, I will be using my experience as a 64 guy to make some educated guesses in determining the realism of DCS Ka-50 model.
So let’s get started.
First Look
The Ka-50 is the only helicopter model that I have reviewed for HeliSimmer that I haven’t seen up close in person. So confirming the accuracy of the exterior and interior models is difficult. I pretty much had to rely on unclassified online resources. Based on that, this is a VERY detailed model! This clearly set the standard for all of the DCS helicopters that came after it. Even though it was released many years ago, it still holds its own against the more recently released models in terms of visual complexity.



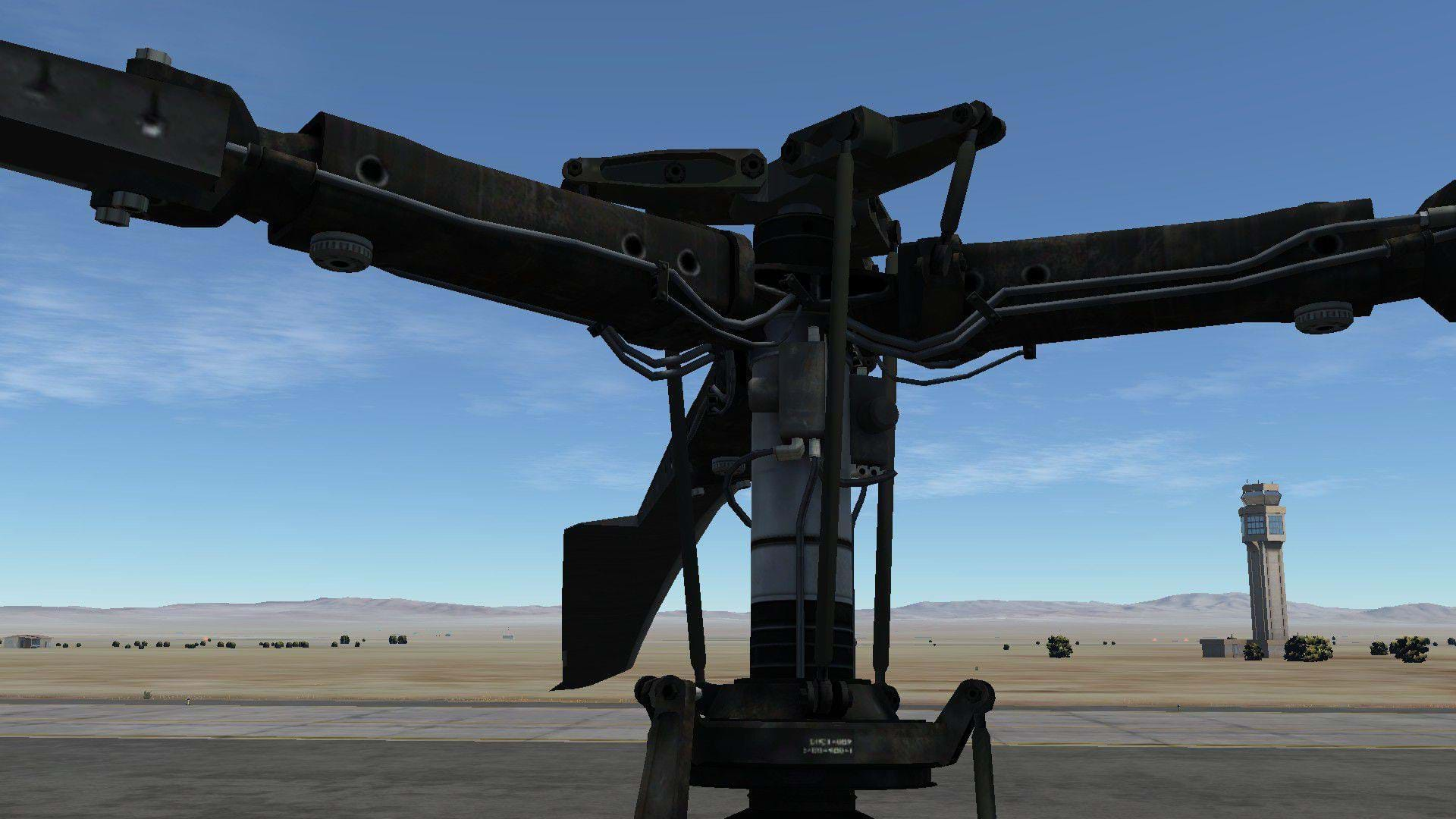
The exterior model features nicely done details like hydraulic tubing, vents, and antennas. The complex workings of the landing gear are also modeled and animated very nicely. This is the only retractable gear helicopter in DCS, and one of the few RG helicopters I’ve got for any sim. I often forgot to bring the gear up after takeoff!


The most unique feature of the Ka-50 is one that is share by almost all Kamov helicopters, and that of course is the coaxial rotor system. Kamov is a manufacturer that is known for its coaxial helicopters in the same way that Kaman is known for its intermeshing rotor, and Piasecki was known for its’ tandem rotor helicopters. Kamov didn’t invent the coaxial rotor, but Kamov certainly made it a viable operational configuration. The Coaxial rotor really found its niche in the Russian Navy in the 1960’s and 70’s with the Ka-25 and Ka-27 respectively. Mounting two main rotor systems and turning them opposite of each other is by nature a very complex feat of engineering. DCS does a very good job of depicting it.

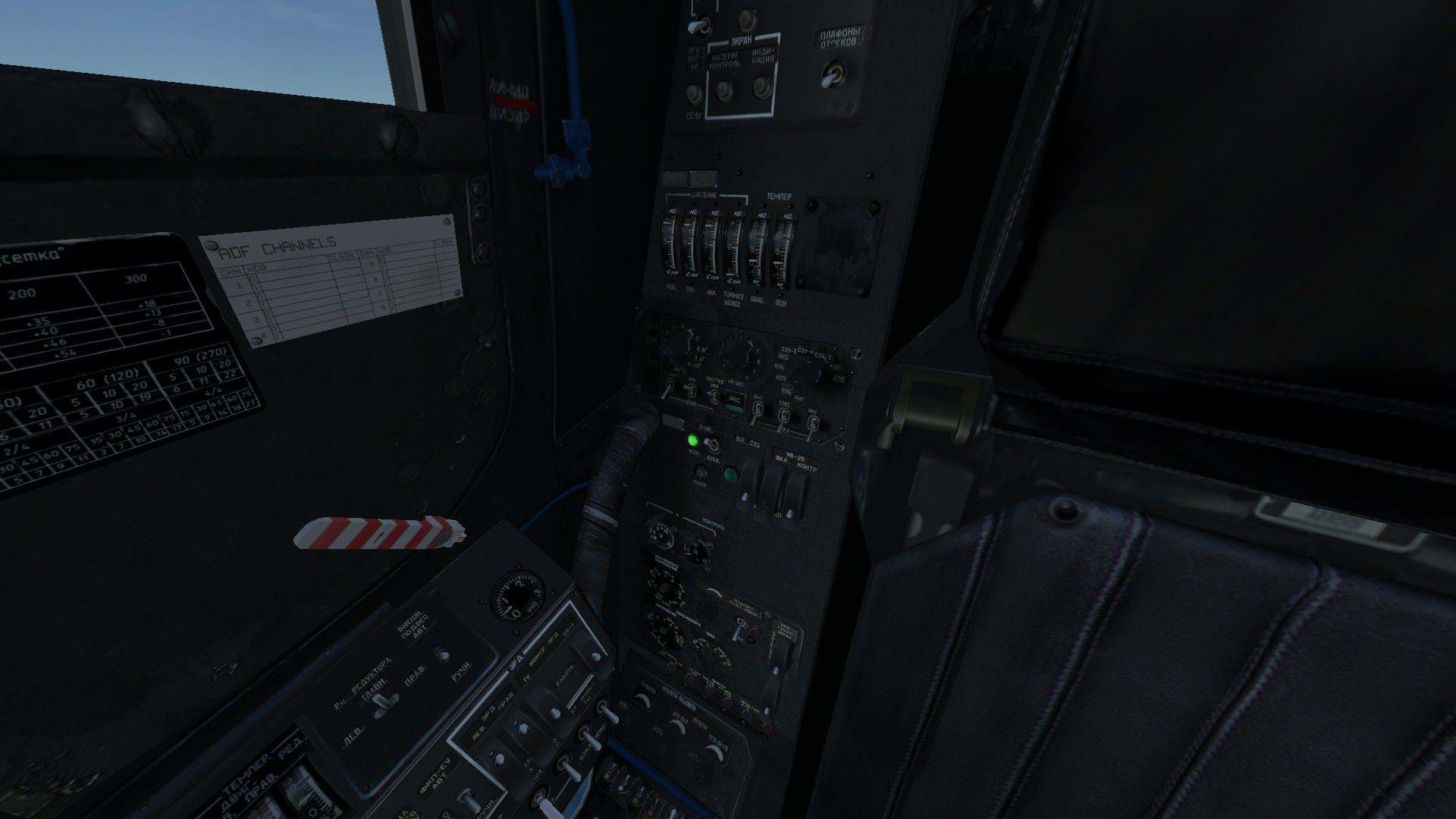
The internal visual model is also extremely detailed. Unlike some later DCS modules that use very impressive artwork for their texture/skins, the cockpit of the DCS Ka-50 looks like it uses a mixture of photos and artwork to bring the cockpit to life. The photo based textures look good, and so do the art based ones, but the inconsistency sort of brings you out of the moment and sort of causes a hiccup in your immersion. But it’s a very small hiccup, one that I got over very quickly. The photo textures really aid in the authentic feel of this model, mostly because of all the Cyrillic characters marking each switch. Now, if you’re like me, and don’t speak or read Russian, there is an option to switch the cockpit labels to English from the Special Menu on the Settings page.



If you’re using VR, this cockpit will feel a bit cozy, which is common for attack helicopters. AH-1 and A-129 cockpits are much smaller than this believe it or not. What I did find interesting was the visibility. Overall it’s generally good, but it is somewhat obstructed by the overhead switch panel and armor plates. Good visibility is very important in an attack helicopter; I imagine that Kamov had to do this as a compromise. With only one seat, all of the controls had to fit in one cockpit, which meant some trade-offs.

One of the big stand-out additions in the Ka-50’s cockpit is the big white rocket motor mounted above and behind the pilots head that is part of the K-37-800 ejection seat. For your aircraft egress system aficionados out there, yes, I know this isn’t a true ejection seat in the pure sense, but Tractor Rocket Escape System doesn’t sound cool. Actually, on second thought, it does sound pretty cool.






When activated in DCS, the emergency egress sequence isn’t exactly the same as what I’ve found in my research for this review, but it happens so quickly that discrepancy is negligible.
Sounds
I really wish I could provide a better critique on this models sound accuracy, however my request to the Russian Armed Services for technical and audio data were ignored. So, I can’t say with any real certainly that this sound set is realistic. However, the external sounds are somewhat similar to a Kamov Ka-27 (HH-32) that I saw fly by when I was stationed in Korea. The lack of a tail rotor gives the Coaxial rotor system a distinct sound that is almost muffled which is what the DCS Ka-50 sounds like to me.
Systems
As I sat in the virtual cockpit of the DCS Ka-50, the first thing that came to mind was that this aircraft was very “Russian” or “Soviet” looking. And I don’t say that because of all the Cyrillic characters that labeled everything. Compare a Russian helicopter to a western one of similar generation or purpose, and you’ll notice that there are generally more leavers, switches and buttons installed on the Russian aircraft. The Russian military has always had what we in the U.S. call a “Ford over Ferrari” mentality, which was most prominent during the WWII and the Cold War. This philosophy basically states that you build high quantities of cheap, low tech, reliable equipment to overcome your adversary, instead of a few, expensive, high tech, high performing machines. This philosophy has served them very well in past conflicts, especially WWII. However, when it comes to the inherent complexity of helicopters, low tech doesn’t always mean that it is less complex.

The Ka-50 seems to bridge the gap between the old “Ford over Ferrari” mentality and Russia’s early ventures to develop a new 4th and 5th generation combat aircraft. So, The Ka-50 features the usual barrage of switches found on most Soviet era aircraft. It also seems like the Kamov engineers once again had to make some choices, because a lot of these switches are in places that would be difficult to get to in such a snug cockpit especially in-flight during combat.
The DCS Ka-50 comes with several training missions that walk you through the aircraft’s start up procedure, which is the most complex start up of any DCS helicopter module I have. I can’t confirm the accuracy of this start up procedure, my request to the Russian armed services for one Ka-50 for evaluation was ignored (they’re a little upset with us right now).
I had to go through the training mission several times to get a good feel for the start up. This can be a real challenge if you’re going for the authentic Russian Ka-50 experience, mostly because of the Cyrillic markings for each switch, button and knob. Turning on the tooltips option in the main DCS menu helps with this. But, if you’re a non Russian speaker, don’t understand the Cyrillic alphabet, or are just lazy like me, be sure to set your cockpit to the proper language.
The DCS Ka-50 also features the most sophisticated navigation system of any other DCS helicopter module available right now and in the foreseeable future. It’s the only Helicopter module that has a full color moving map, which is really, REALLY handy! The moving map is part of a Multi Purpose Display that is thankfully in English for the American version. There are also a few training missions for the navigation system to help the user get acquainted with the basic and advanced functions of the navigation functions.




The autopilot function is pretty cool and simple to use once you know where the switches are. It can hold a hover, and follow a route if commanded to do so. I imagine to real Ka-50 pilots, this is essential to reduce the workload of a single pilot operating in a combat environment.
Weapons
Aside from the coaxial rotor, the weapons systems are what really make the Ka-50 stand out in DCS. You get the option for guided missiles in the form of the 9K121 Vikhr, ee NATO guys call it the AT-16 Scallion, and the Kh-25ML, the laser guided variant of the Kh-25 (AS-12 for the NATO folks) family of soviet era air to ground missiles.


The Vikhr is the missile most commonly found on the Ka-50, and the one I spent the most time with for this review. It is laser guided, but instead of being a laser homing missile, the Vikhr is a beam riding missile. The Ka-50 carries 12 of them which will sound like a lot. But this is another case of Ford over Ferrari. Even though the Vikhr is designed to defeat heavy armor, it is a very small missile with a small warhead compared to other air to ground anti armor missiles. Because of this it often takes two missiles to get the desired target effects on more robust vehicles. I found the modeled Vikhr missile performance to be pretty similar to what is known about the missile in the western world.
The Kh-25 is probably my favorite missile for the Ka-50. Because of its size, the Ka-50 can only carry two of them. There’s no tutorial for its employment, so I had to experiment a little in order to actually hit something with it. But it is a big heavy fun missile to shoot! The shift in the center of gravity is very noticeable when the Kh-25 flies off the rail!

The DCS Ka-50 also gives the user a choice of unguided rockets in the form of the S-8, and the S-13. There really isn’t much of a perceivable difference between the S-8 featured with the DCS Ka-50, and the Mk66 HE that comes with the UH-1H. DCS does a pretty good job modeling the basic ballistic profile of free flight rockets, which is about all they can do. In real life unguided rockets are susceptible to all sorts of variables that DCS seems to ignore. However, there is a upside to that lack of realism in that the rockets will always go in the vicinity of where they are aimed, which makes them much more fun to shoot in the sim.



The ballistics of the 30mm rounds fired from the 2A42 is about as realistic as the rockets, and its close enough to be fun. One thing that it does have that I did appreciate is the increased dispersion with range; I thought that was modeled reasonably well. You also get the choice of high explosive, and armor piercing (AP) rounds, which is a feature the real 2A42 is famous for. DCS did a good job of showing the difference between the target effects of each of these rounds. The HE rounds have much more of a visible explosion on impact, a little too much for a 30mm round that size, but it looks really cool so I’m not really complaining. You’ll also notice that the AP rounds will have a tendency to ricochet, I don’t know if that’s accurate or not, but it is fun to watch.


In addition to the mounted 2A42 30mm cannon, you also get the option for UPK-23-250 23mm gun pods mounted on the wing hard points.


There are several types of unguided free fall bombs available as well. Your choices of bombs are both the more traditional general purpose FAB 250 and FAB 500, and the sub-munitions type KGMU series. Dropping bombs from helicopters is a novel idea that was tested, and then for the most part abandoned by western militaries, but it’s still firmly entrenched Russian doctrine.

I’ve never dropped a bomb from a helicopter, so I won’t even guess at how realistic this is except that I’m certain the inaccuracy of hitting a target with a free fall bomb dropped from a helicopter is probably spot on. I’m sure there are some hardcore DCS players out there who have figured out some way to use the FAB250’s and 500’s.
The included training mission takes the user through the set up and operation of the Vikhr laser guided missile, the S-8 rockets, and the 2A42 cannon. Once again, for those who don’t know or understand the Cyrillic alphabet, it helps to have the tooltips enabled, so you can put your mouse on a button and confirm you have the correct one, or you can, again, be lazy like me and switch your cockpit labels to English.
The Ka-50 has the KU-31 Shkval targeting sight. I can’t find a lot of information on this system. General Viktor Bondarev ignored my emails and declined my Facebook friend request, so I can only speculate on how accurate the depiction of this system is. But from what I can tell it’s very limited in its functionality as a sight, which might be by design. The KU-31 is another aspect of the Ka-50 that is very “Russian”, well, actually “Soviet” would be a better word for it. It has a very limited field of view, few operating modes, only two field of view options, and a narrow articulation range. It’s simple, straight forward, and really good at a few things but not much else.
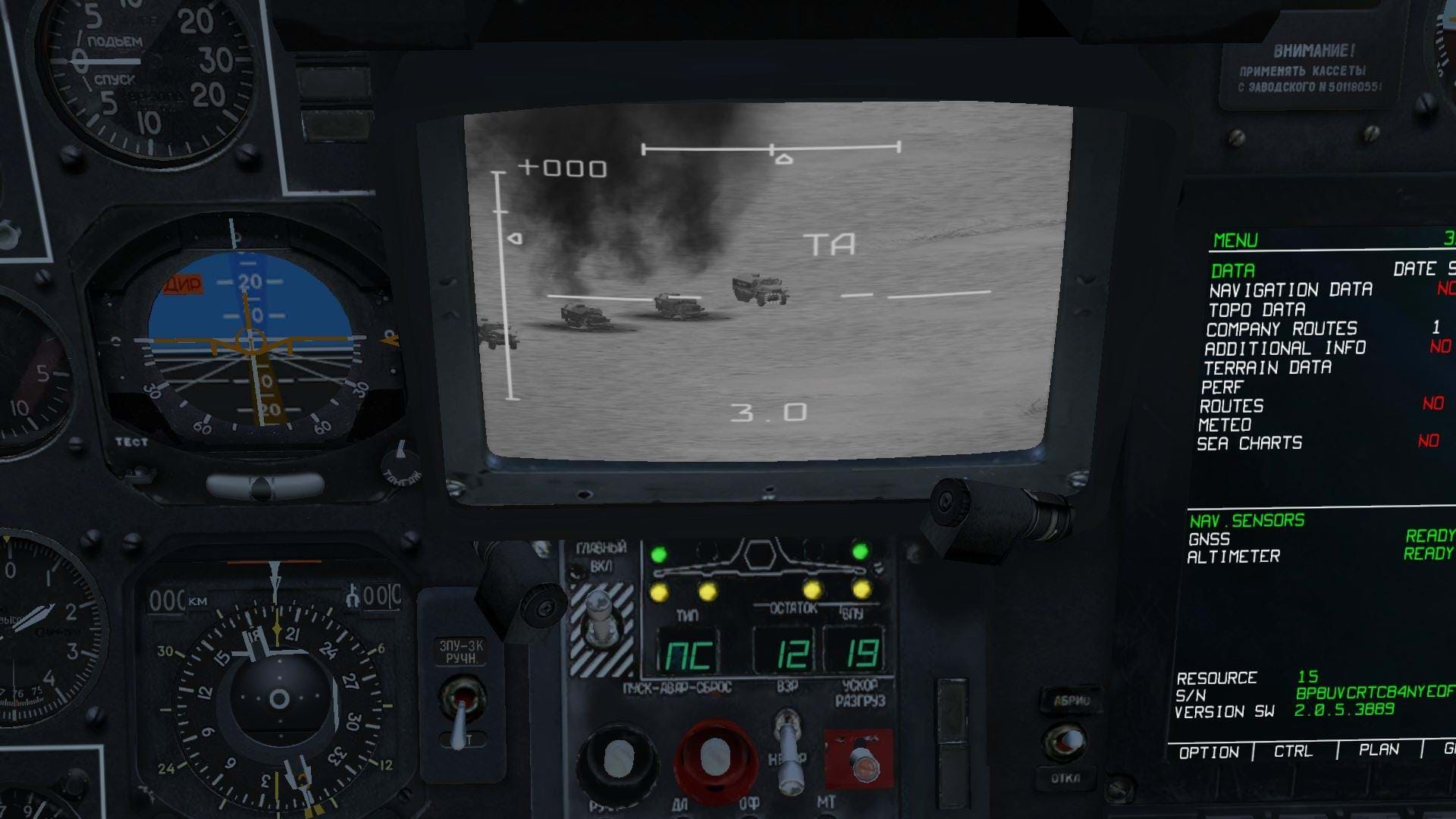
Because of its limited articulation range, it’s good for looking at or shooting at things that are directly in front of the aircraft. If the pilot wants to look at something outside of the relatively narrow left and right limits, he or she must move the entire helicopter, which can be a bit undesirable in the confined space of a masking position. But the Ka-50s automation makes that a little easier because the auto pilot has a selectable function that will automatically align the nose of the helicopter to the line of sight of the Shkval.
The KU-31 is almost strictly a weapons employment tool, not a situational awareness tool. But one must consider that a more flexible and capable sight, like what you’ll find on most modern attack helicopters would be a lot for a single pilot to work with and not run into anything. I found the sight on Polychop’s SA342M to be better for overall use than the KU-31. It must be noted that newer versions of the real life Ka-50, like the Ka-50SH, have upgraded sights and sensors which look to improve upon all of the short comings I just mentioned.
One part of the targeting system I did appreciate is the helmet mounted reticule. This is a little targeting reticule that flips down over the pilots’ eye and enables him to designate targets by looking at them. It’s nowhere near as sophisticated and functional as the helmet mounted sights on helicopters like the AH-64 or A-129. It is closer to the functionality of the Helmet mounted sights found on the late model AH-1 Cobra Helicopters of the late 80’s and early 90’s.
Side note: if any developers are reading this, you guys should make an early or late model AH-1 Cobra for DCS. I’m thinking the AH-1G, J, S or F, or T would be great. Seriously, that would be awesome, thanks in advance!
The targeting reticule is really good for rapidly orienting your KU31 sight in the general vicinity of the target you intent to engage. It’s really well done with the DCS Ka-50. It appears in front of the user as a blurry ring with an illuminated reticule in the center. It’s blurred to simulate your eye’s inability to focus on something so close to your eye. This effect is even more realistic in VR.

Using all of the guided weapons involve the pilot spending a lot of time looking deep inside the cockpit (heads down) and not looking outside. This is probably the reason Kamov put so much time into the Ka-50’s navigation and autopilot systems. Even with the all of the automation I think a real life Ka-50 pilot would get task saturated very quickly in a real combat environment that it was intended for, which is probably the reason the Ka-52 exists, and there are more Mi-28’s in service. However, the single seat Ka-50 naturally lends itself to combat flight simming. With the exception of multi-player, and shared cockpit most users are by themselves. Even in multi player, each user occupies his or her individual aircraft so it really gives you a lot of independence without having to rely on any A.I. co-pilot functions which are notoriously difficult to model.
Flight Dynamics
I’ve never flown a real Ka-50, Russia won’t let me. I also don’t know anyone personally who’s flown a Ka-50 or even someone who’s flown any production type of coaxial rotor helicopter. My only real experience with a coaxial rotor is with an inexpensive four channel RC helicopter sold at kiosks in local shopping malls.
Even though they are very complex, they’re also known for being quite stable. They’re also known for being more efficient when it comes to hovering as no engine power is being diverted to the tail rotor. There are tones of advantages to the coaxial rotor, but one of the big ones being its inherent stability. That is one of the reasons the Soviet Navy adopted the Kamov helicopters in the 60’s. The stability of the Ka-25 made it ideal for anti-submarine warfare, and other maritime duties. This stability is very noticeable the first moment you bring the DCS Ka-50 to a hover. Even without the auto hover on, the model just sort of wants to sit there, with relatively little inherent drift. Which, I’m assuming is due to the modeling of the coaxial rotor system.
Even though I’m sure torque effect is modeled, it’s mostly transparent to the pilot due to the contra rotating rotor systems. This means not needing a large amount of pedal to maintain the heading of the aircraft isn’t required, which it wasn’t when I evaluated this model.
I can’t definitively say if the DCS Ka-50 behavior in flight is realistic, but what I can do is compare its performance to other helicopters I’ve flown of similar weight, size and mission. Even then, I’m not going to compare them too closely because none of those helicopters are coaxial.
Over all, I found the Ka-50 to very nimble for its size, probably a bit too nimble, but I had fun with it so I’m not complaining. The Ka-50 has an empty weight that is over 2000 pounds heavier than any western attack helicopter platform that I know of. For a single seat aircraft, it sure has a lot of weight to carry around. But, being heavy isn’t an uncommon characteristic of Soviet era attack helicopters.



Despite the weight, it’s cyclic authority and response is very good, provided the auto pilot functions are disabled. Attempting to fly this model with the autopilot engaged makes it feel like the default Bell 206B from FSX. Depending on what you read, and where you get your information from, the Ka-50 has been praised for its exceptional agility. I found this models’ agility to be very good, however I wouldn’t necessarily call it exceptional. It’s certainly agile, but no more than any other attack helicopter I know of.





Agility aside, there are a few undesirable characteristics in its flight performance that are noteworthy. The second most undesirable flight characteristic of the DCS Ka-50 is its very poor yaw control. All coaxial helicopters control yaw at a hover by harnessing the torque differential from each main rotor. I’m not sure how accurately this is modeled in DCS, but to me it seemed to be slow to take effect, and its effects were not as authoritative as I would have liked. In my research for this review, I found that yaw control is a common complaint in coaxial configured helicopters, so this might very well be how the actual helicopter performs. In cruse flight, most of the yaw control is done with the airplane style rudder on the vertical stabilizer, but I found this to also be sluggish.

I often found myself adding pedal all the way to the stop to get the aircraft to do what I wanted, and even then it wasn’t quite the response I was used to getting from an attack helicopter. This was especially noticeable when doing combat maneuvering flight. Keeping the aircraft in trim and bringing the nose to bear on a target took a lot of getting used to because of the slow and sometimes inadequate response from the pedals. You really have to be ahead of the aircraft and anticipate the about of yaw control you may need, even then the Ka-50 sometimes falls short of giving you the yaw authority you need to get your nose on a target and deliver weapons after rapidly repositioning the aircraft. I found this really frustrating, especially when firing unguided rockets using high energy tactics.
Now, let’s talk about the number one most undesirable flight characteristic of the DCS Ka-50. Back in 1998, A Ka-50 was lost in flight killing its pilot. The cause of the accident was determined to be the two main rotors striking each other in flight. The results of the official Russian investigation stated this;
"The cause of the crash was the unintentional entry into an unexplored flight regime during complex combat maneuvering exceeding current flight limitations."
The propensity of the coaxial main rotor to hit itself in flight was well known, all the way back to the 50’s or perhaps even further back in time. Igor Sikorsky and Author Young both experimented with coaxial helicopter models although none of their designs went past the model phase. Predictably, this explanation didn’t sit well with most aviation experts. During my research for this review I also found that the first V-80 (the designation of the Ka-50 prototype) lost due to self collision of the rotor system. This crash reportedly happened in April of 1985.
Because this is a simulator, I felt compelled to find this “unexplored flight regime” and well….explore it! I wanted to see if I could recreate these accidents inside DCS. And long story short, I did.

Because none of the reports I could find were very detailed, I had to rely on a basic understanding of how coaxial rotor systems work, and do some guess work. But after about 5 minutes it was pretty clear how to get this helicopter to have a mid-air collision with itself. In fast forward flight, the lower rotor disk is has higher coning of the rotor blades on the right side of the aircraft. The right side of the upper rotor system is flapping down bringing the two rotor disks dangerously close together as they compensate for dissymmetry of lift.

At this point, all one needs to do is add a rapid left cyclic input and your main rotor blades will meet in a catastrophic fashion. This suggests that the modeling of this rotor system by DCS is really good. Aggressive high speed turns are something attack helicopters do on a pretty regular basis, for a lot of practical reasons. It makes you wonder why Kamov would produce an attack helicopter with such a weakness.





After that initial experiment I was able to induce the self collision of the two main rotors in more ways that rapid lateral cyclic during fast forward flight. For example, the amount of aft cyclic input required to recover from a steep right hand diving turn also resulted in self collision of the rotor system.






