Introduction
The AS365 is the sleekest helicopter ever to come from the engineers at Aerospatiale. Evolving from awkward looking single engine SA360, the AS365 matured into a beautiful medium twin engine helicopter that has found a place in the fleets of civilian and military operators around the world.
If you live in the United States, it’s likely the most common variant of the AS365 you’re familiar with is the HH-65 Dolphin. Until the introduction of the UH-72 to the U.S. Army fleet, The HH-65 was the only non-American designed helicopter in the armed forces of the United States. This alone speaks to this aircraft's versatility.
A little while ago, Cera Sim released their version of the AS365 for FSX/P3d. In particular they chose to model the N3 variant, which was the last production version of this airframe before it evolved again, into what Eurocopter branded the EC155.
HeliSimmer got a copy to play around with, and here’s what we found.
Installation
The installation of the AS365 is pretty straightforward: there’s an exe File that most FSX payware users are familiar with. Just select the folder that you have FSX is installed in and let the program do the rest.
First Look

Cera Sim produced some of my favorite models for FSX. I’ve always adored their Bell 222B, and put in a lot of sim time on their Bell 212 before that. Even though I don’t spend a lot of time in FSX anymore, every now and then I still find time to go back and visit with these models. Cera Sim has a reputation for outstanding visual models, and I don’t mind telling you up front that their AS365 maintains Cera Sim's strict standard for quality.




The model comes with 5 liveries, which illustrate the versatility of this airframe as a work horse. There’s a naval livery, law enforcement /HEMS, SAR, and U.S. Coast Guard paint jobs available. Also included is a pretty good paint kit.

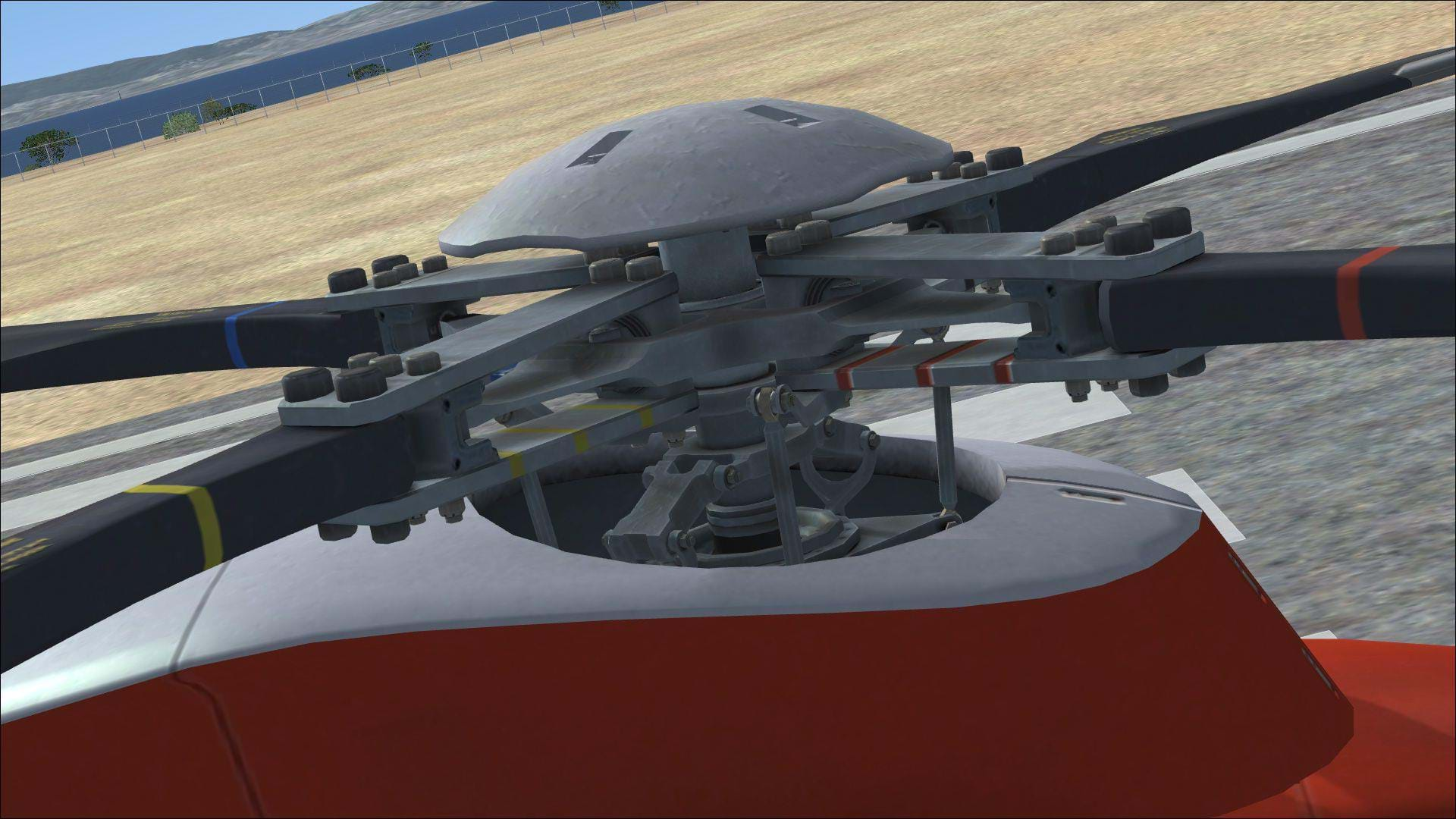
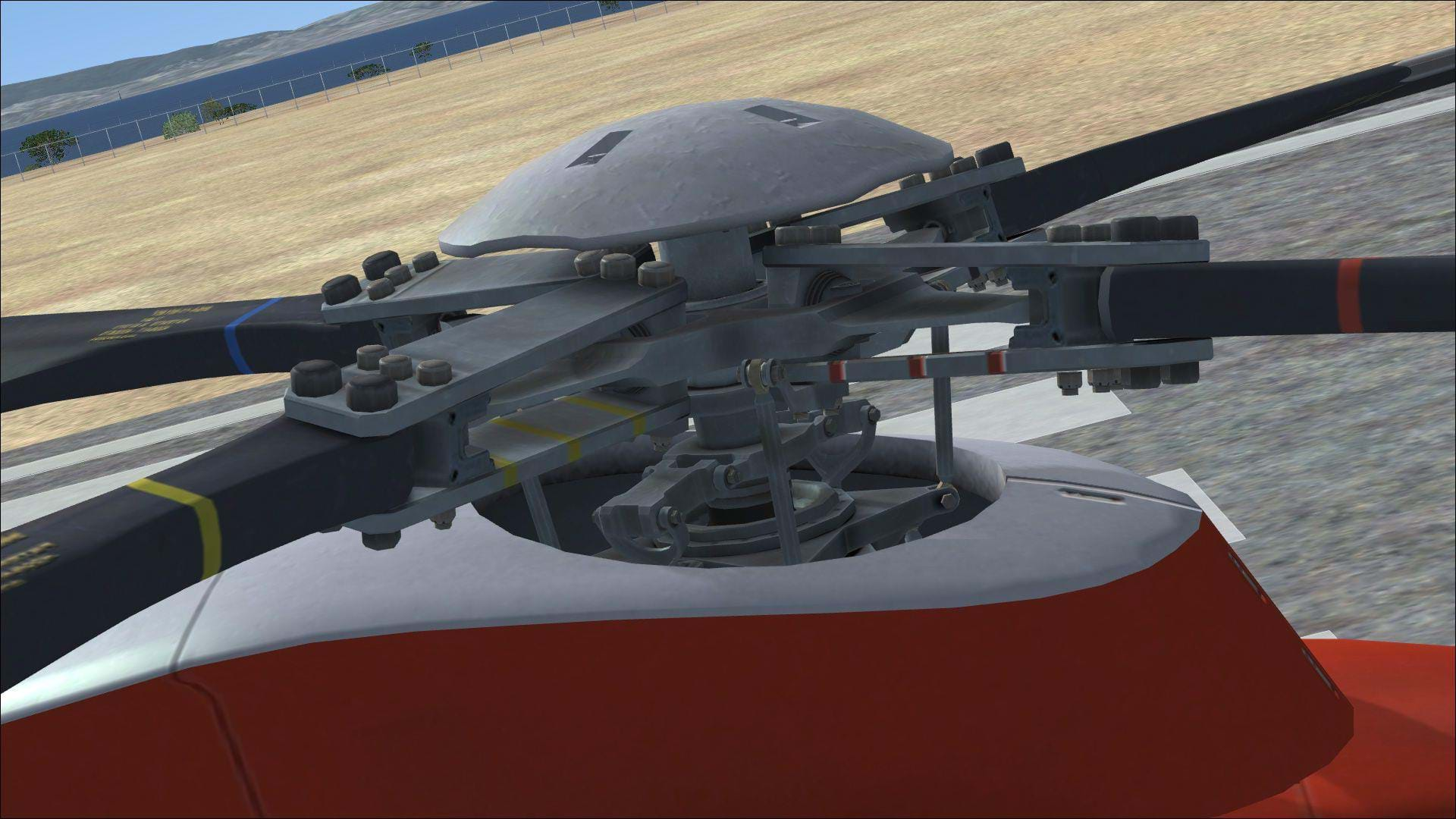
The main rotor head features a very detailed and well modeled depiction of the Aerospatiale signature StarFlex rotor system, with very nicely done animation for collective moments.
The fenestron is also very well modeled, in particular the spacing between the fenestron blades. You may notice that the spacing between each of the blades isn’t equal all the way around the hub. There is a group of 4 blades with equal spacing, a wider space divided by a single blade, four more equally spaced blades followed by another wide space split by a single blade. This asymmetrical blade distribution is one of two changes Eurocopter made in an effort to make the fenestron quieter. The first being the 10-blade fenestron vs. the 11-blade configuration found on previous models. The asymmetrical blade distribution changes the constant whine of the 11-blade configuration to more of a pulsating type sound which some say is less audible from a distance, and less irritating to the human ear. It’s a nice detail that Cera Sim added that would likely have gone unnoticed by most users.

The Cockpit visual modeling is very well done, easily on par with other Cera Sim Models. The instrument panel, center console and the rest of the cockpit surfaces are all painted black, which in real life would help make them more compatible with night vision goggles.

The cockpit of all the models is essentially the same; however, the cabin offers some variety in configuration. Each model can be configured as a Search and Rescue aircraft or a passenger configuration via the familiar Cera sim Interaction menu by pressing the shift -1 key combination.


The only exception is the U.S. Coast Guard livery which is strictly a SAR aircraft. The interior of this models cabin more closely resembles the interior of the HH-65 and isn’t reconfigurable to the passenger version.

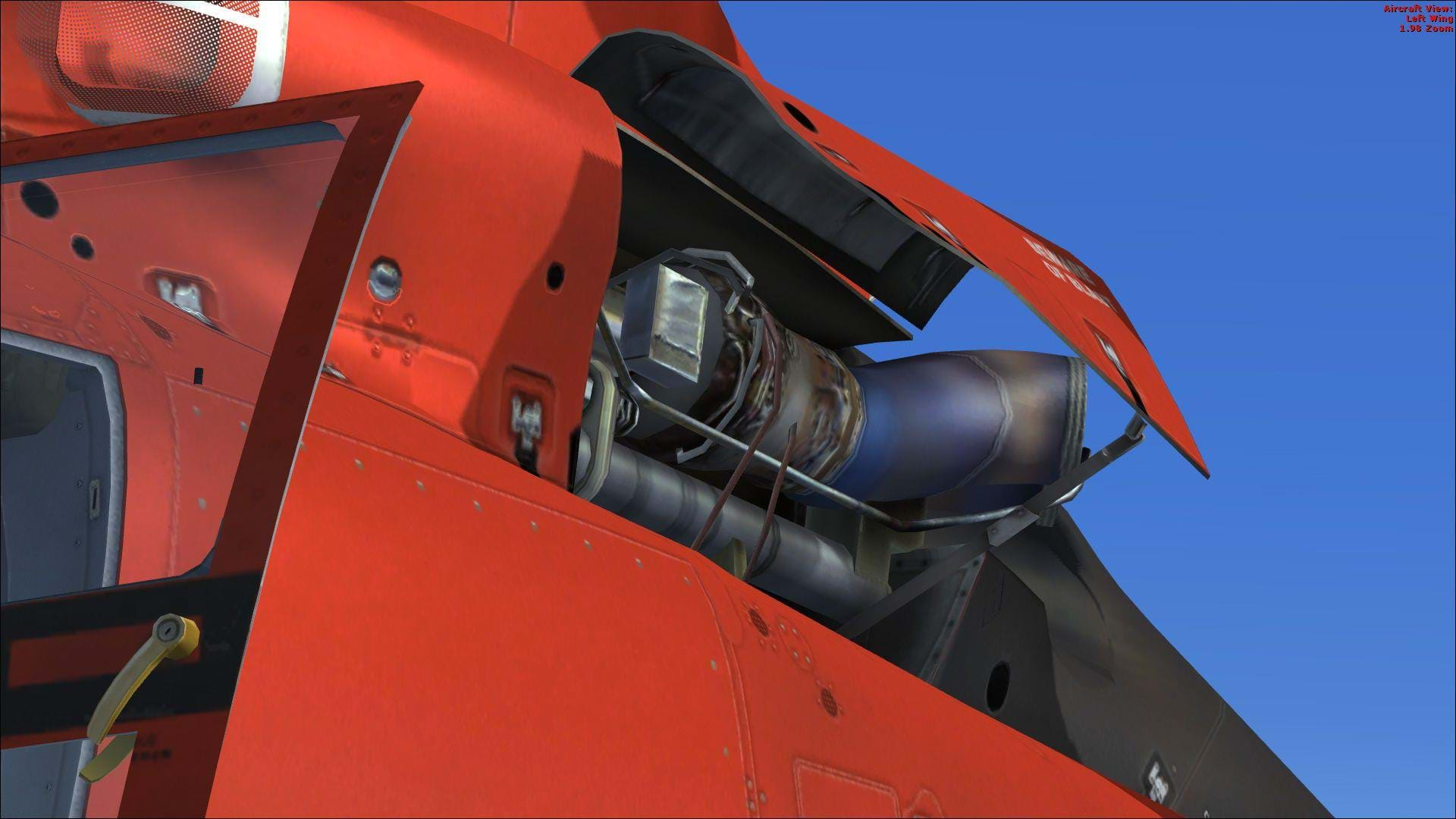
This model also features some good modeling under the hood. As usual Cera Sim took the time to animate a lot of panels, including the radome, and engine compartment doors. A peak under the hood shows modeled radar, and the AS365’s Arriel C2 engines. There isn’t a lot of detail in the engine visual modeling, but it’s enough to be convincing at a glance.

I only have a few nit-picky criticisms about of this model. The first is that it appears that the anti-collision light on the vertical fin seems to be detached from the airframe and just floating in space.
The second is the with the USCG livery. This is really nit-picky I know, but for the USGC livery, the depiction is of an HH-65C, but it’s lacking the air data sensor that’s mounted above the main rotor. This depiction looks closer to the HH-65D configuration which, to my knowledge, does away with that component. I understand that this is likely just the result of Cera Sim using the same exterior model for all of the variants.
The last this I’ll be critical of is that there is no slick or clean model. All of the liveries are fitted with a rescue hoist. I can understand Cera Sim's reasoning for doing this, as the N3 was intended to be used in roles that required high performance which is why you’ll find them in service with a lot of militaries and search and rescue operations. But it would still be nice to have a clean model that really shows off those sleek lines that make the AS365 so visually appealing. It would also allow some of the re-paint artist out there to bring some of the striking paint schemes found on some privately owned AS365s out there to FSX and P3d.
Sounds
The Sounds Cera Sim used for this model is very convincing. From the outside views, the distinctive sound of the fenestron is pronounced and well done. All of the sounds are likely were sourced from high quality recordings of an actual SA365, or another fenestron equipped helicopter. Just like their UH-60L, the sounds also vary depending on what angle you view the outside model. So if you’re looking from the rear of the aircraft, expect to hear more engine noise. The cockpit sounds are pretty good too. I’ve never flown in an AS365, so I can’t speak to their accuracy, however, I found them convincing
If I had one criticism of the sounds used, it would be the sound used for switch clicks. The sound itself isn’t all that bad, it’s just really loud! When I say loud, I don’t mean that it will blow out your speakers or headphones or anything. However, each flick of a switch can be heard over the sound of the engines and rotors in the cockpit. This complaint isn’t specific to the AS365, the Cera Sim Bell 222 is guilty as well. Cera Sim isn’t the only developer to have loud switch clicks, but as far as any of the high end helicopter add-ons for FSX I have flown, the AS365 is the loudest.
Systems
Cera Sims Systems modeling is usually pretty good. This model features the familiar Cera Sim interaction menu that pops up in game, and allows you to open and close doors, panels, add chocks, covers and tie downs. The menu also gives you the option to fire up all of the systems with the push of a button, or shut everything down to cold and dark just as quickly.
I’ve no real experience with the AS365, and unfortunately the user manual included is basically just a description of each button and switch so it’s a little more difficult to learn each system without a guide. That being said, there are plenty of lights, and warning indicators constantly reminding you that you are or are about to exceed an aircraft limitation. The one I came across first was the cyclic limit indication. While on the ground, pushing the cyclic too far in any axis will result in an audio cue heard through the headset.
Not all of the warnings, cautions and limit indicators have audio tones. As with most retractable wheel type helicopters, there is a landing gear warning light featured prominently on the instrument panel that illuminates whenever the airspeed drops below a certain point.
This model also has functioning emergency floats that can be activated with a few clicks on the instrument panel.


The AS365 features an Automatic Flight Control System, and Cera Sim seems to have modeled this as well as a 4-axis coupled auto pilot. The AFCS, and Auto pilots are really interesting in this model, and tie in really closely to my evaluation of the flight dynamics, so we’ll cover it there.
Flight Dynamics
It’s not a secret, FSX doesn’t do light helicopters very well. However, it does tend to lend its self to larger heavier aircraft, or aircraft with Automatic Flight Control Systems. Any sort of augmented stability easily masks FSX’s short comings.
With that in mind, this isn’t going to be an FSX bashing session. Even though it’s on the smaller end of the medium helicopter category, the AS365 is a very stable platform. So the usual critiques of FSX helicopters being overly stable don’t always apply to this model.
The first thing I did with this model was ground taxi. It’s got a wheeled undercarriage, and most helicopters of this type don’t spend a lot of time hover taxiing. So, I wanted to test its ground handling characteristics. The model performed pretty well. Helicopters are typically top heavy, with high centers of gravity. This means aircraft will tend to lean in the opposite direction of a turn when ground taxiing if not corrected by cyclic input.

Picking up to a hover the first thing I noticed is that there was little to no pedal required to maintain heading. This would normally be a check mark in the negative block on a review; however, the AS365N3 has an AFCS. I’m not completely familiar with the capabilities of it so I can’t say for sure if it’s capable of automatically compensating for torque in the yaw axis, but it’s certainly plausible. Not to let things stand there I switched off the AFCS stability axis one by one to see just how authoritative the AFCS was. Unfortunately, I didn’t really notice any difference between pedal input in hovering flight with the AFCS on, and with it off. Now it is possible that the AS365 has a mechanical yaw compensation system linked to the fenestron. Some larger helicopters have this to ease pilot work load at a hover, but I don’t know if that is the case with the AS365, so I’ll withhold judgment on that aspect.
The second thing I noticed is that this aircraft picks up nose high, which is consistent with what I’ve seen with the coast guard aircraft that I am accustomed to. I found this model to be very stable, with minimal need for drift correction, which again, isn’t necessarily unrealistic in this case. Some variants of the AS365, specifically the HH-65 of the United States Coast Guard have automatic hovering capability. This feature is especially helpful when hovering OGE over open water with no visual references, which the Coast guard and other maritime operators do regularly. So again, I can’t really knock this flight model for being too stable at a hover because this capability may have been designed into the airframe in real life.

The transition to forward flight is smooth, and acceleration is very fast! 0 to 120 KIAS takes no time at all! That being said, slowing down takes a little more planning to avoid overshooting your intended landing area, especially if that landing area is small.


One of the most interesting things about this flight model for me was the integrated 4 axis autopilot. This is the first autopilot I’ve reviewed for FSX, so I was curious as to how it performed. I spend a lot of my sim time doing IFR training, so I figured I’d take this new model out for a short instrument flight. I took off from Bob Hope airport (KBUR) via the ELMOO EIGHT departure, flew south east on V-186 to paradise VOR (PDZ) and the set up for the ILS runway 26 approach into Ontario International (KONT). This is a flight route I’ve already tested in other aircraft, and have flown with online ATC using PilotEdge.

The purpose of this flight was to test the Autopilots ability to track headings, track navaids, make turns, climbs and descents. It’s a very short flight, but at 90 KIAS, it give you time to tune your radios, and play with the systems.
Now, I know what some of you are thinking: this is more of a systems evaluation than an evaluation of the flight dynamics. Well, rest assured, I agree with you to a point. In my opinion, when it comes to actual training a model should perform as well with human input as it does with automated input. Any quirks or odd behavior that doesn’t match up to your expectations is bad enough when you’re on the flight controls. Quirks and odd behavior when you’re putting your trust in the automation and hands off is slightly more frightening in real life. This is why I decided to cover it in the flight dynamics portion rather than systems. So, how did this autopilot do? Well, we’ve got some things to talk about.
It is rock solid when coupled to your GPS and will follow your route with no issues, unless you’ve planned a very tight turn, which we’ll talk about in a little while. When heading hold is selected, the aircraft makes a slow easy effort to get around to the heading chosen by the user. This autopilot seemed to have a little bit of trouble tracking the initial course set on HSI when tracking a VOR. Not anything that would raise eyebrows, but it’s not as good as I think it could be. Almost as if the VOR signal isn’t quite powerful enough for proper tracking. That being said, if you change your course on the HSI, it will adjust very well, and track within one bar width on the HSI.
The vertical speed hold works very well. Climbs and descents can be adjusted with the knob directly on the altimeter using the mouse wheel. The airspeed hold mode also works very well. You can use the hat switch in the virtual cockpit cyclic to adjust the airspeed up or down using the right and left mouse buttons. Over all I was really pleased with the airspeed hold with one exception, and we’ll talk about that in the next paragraph.
While course changes with the HSI are done reasonably well, course changes with the GPS are quite another. It’s about a 90° turn from the Paradise VOR to the FONTA intersection. I figured a turn of 90° would be easy enough for the autopilot, so I sat back and watched to see what it would do. This is where things got weird. Instead of making a coordinated turn by banking the aircraft the autopilot maintained the same wings level attitude throughout the turn, basically turning in the yaw axis only and not the roll axis. And somehow, during this flat turn, the trim ball stayed dead center. That is certainly unrealistic. As it was making this flat no bank turn that was magically till in trim, the airspeed rapidly decreased from 90 KIAS, to a little less than 50 KIAS. This is the one time the airspeed hold function didn’t really appear to operate properly. But, in all fairness, the flat, yaw only turn put a lot of drag on the airframe which would slow the aircraft down.
It was at the end of my ILS approach at my decision height where I found the part of this autopilot system that impressed me the most. This was the functional Go Around button. This is the first operational Go-Around Button that I’ve seen in FSX. In this case, the go around button is conveniently located on the collective about where the pilots left thumb would rest. Press this button with the mouse and the Autopilot immediately starts a climb and turns about 45° executing a missed approach procedure.
Another thing about the autopilot that should be mentioned is that it doesn’t appear to function when the user is in any view other than the virtual cockpit. Switch to any external view and the aircraft begins to drift off course. Switch back to the virtual cockpit, and the aircraft immediately begins to right itself.
The last thing I wanted to test was this models performance with one engine inoperative. Single engine flight is something most twin engine helicopter pilots train a lot for. I know I do. And FSX as a platform makes it difficult for developers to give the user a believable single engine operation experience.
So, while in flight I purposely failed the number 2 engine via the fuel control, and watched to see what indications I would get and how the model would handle. The instrument panel showed everything I expected from a twin engine FADEC type equipped helicopter. NG, torque and T4 (also known as TOT, TGT, MGT, and EGT) indications on Engine 2 dropped rapidly, and I could see engine 1 automatically pick up the load. All of that was perfect. Unfortunately, the aircraft continued along as if nothing had ever happened. This wasn’t unexpected, and you can’t really give negative marks for something the developer probably can’t replicate due to the restrictions of the platform.






