
There is no debating that Frank Robinson has had success in the helicopter industry. The R22 and R44 are some of the best selling aircraft in history. The Robinson Helicopter Company is looking to continue their success and perhaps get a foothold in the light single engine turbine market with its latest offering to enter full scale production, the Robinson R66.
Alabeo is a well known producer of flight simulator add-ons, and is known throughout the community for their high quality fixed wing models. Alabeo is also one of the few cross platform developers that create versions of their models for FSX, FSX-SE/P3D, and X-plane 10. Back in March of 2016, HeliSimmer's writer Nick Bates reviewed the Alabeo R66 for FSX. If you haven’t read it you can find it here.
In this review, we’re going to take a look at the X-plane version.
Installation
Just like all X-plane installs, just place the unzipped files into your Aircraft folder wherever you have X-plane installed.
First Look
Alabeo is known for their fantastic visual models, which is good news for X-plane users. For a long time, the high quality visual model racket was completely dominated by FSX. There are only a few developers exist that help to level the playing field and Alabeo is one of them.
The Alabeo R66 is a beautiful model! And I say this purely from a 3D modeling perspective. Personally I hate the way the real R44 and R66 look, but Alabeo did a really good job bringing this model to X-plane. It’s one of the most detailed and best looking helicopters for X-plane I’ve looked at so far. As far as I can tell it is identical to the FSX visual model. The outside textures are very polished and clean, with several liveries to choose from.


One of the giveaways that this is the exact same FSX model is the rotor head. It’s nicely done, don’t get me wrong, but it is still missing some components that would be essential for flight. I found it rather odd that the developer would go through so much trouble to give us such a fantastic re-creation of this rotor system, only to simply leave out the swash plate drive link assembly, and the control linkages. This was the same deficiency that Nick noted in his review. In my opinion, this wouldn’t be such a big deal if the rest of the rotor system hadn’t been done so well.


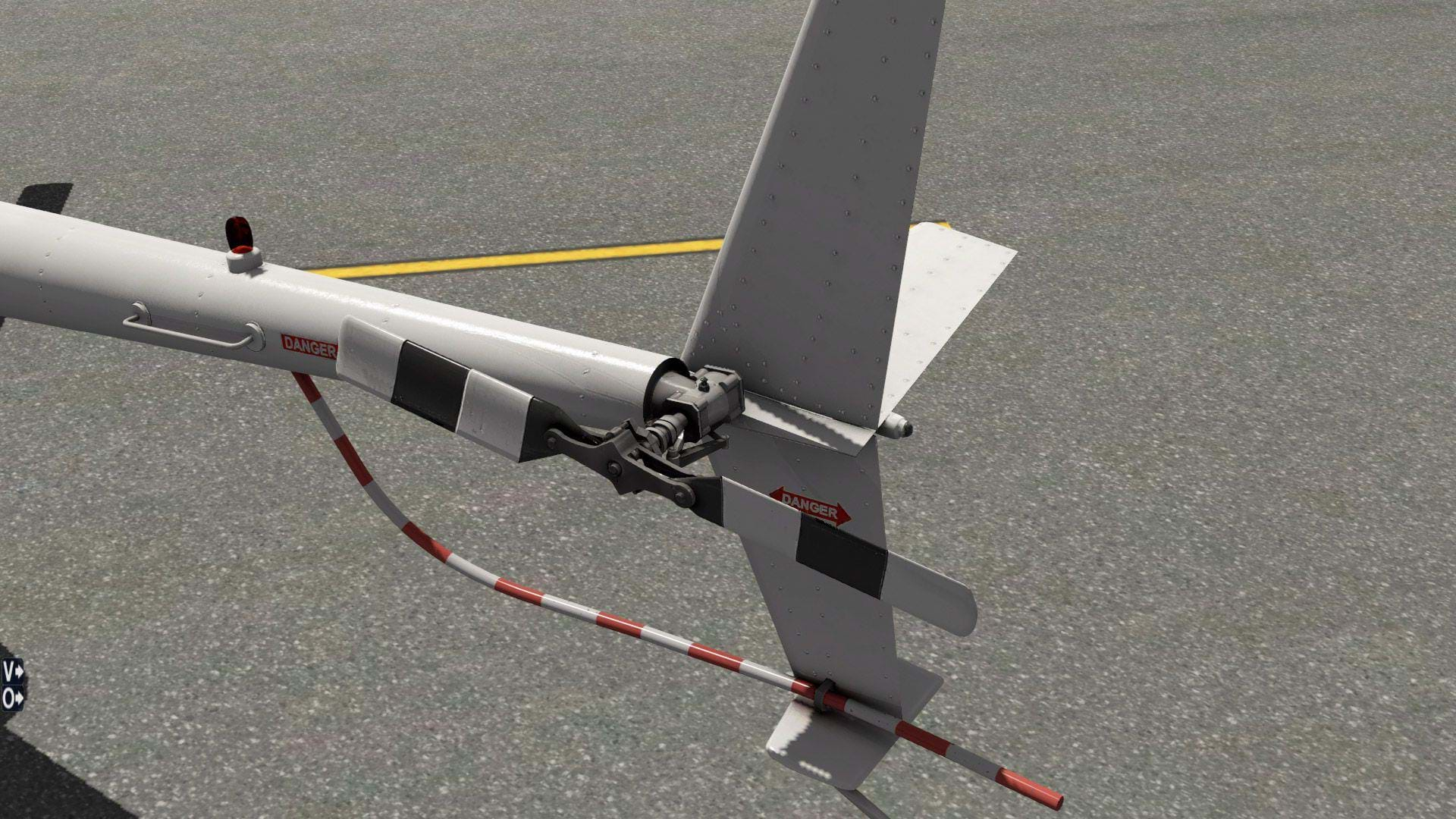
The tail rotor is also very well modeled. But here again, we find the same misplaced stinger on the lower end of the vertical fin that appeared on the FSX model. To me this is only a slight blemish on an otherwise well polished exterior model.


The Alabeo R66 does pay attention to detail on other parts of the airframe. While the R44 and the R66 resemble each other very closely. There are some subtle differences that Alabeo picked up on that help bring this model to life. For example, the new air intake openings at the base of the main rotor mast, as well as the small gap in the new main rotor mast fairing are unique to the R66. Alabeo also added the additional vents just above the engine compartment just forward of the tail boom.


The part about this visual model that impressed me the most about was the virtual cockpit. Again, not a fan of the real R44/66, but this cockpit looks really good! It’s right up there with the DreamFoil Bell 407, and almost as good as the DreamFoil S-300CBi in terms of visual quality. There are plenty of details to be seen such as the Pilots operating handbook, type certificate, and various other placards. Even the seat belts look realistic. And much like the DreamFoil products, the Alabeo R66 virtual cockpit looks amazing with a virtual reality HMD.




In addition to the misplaced tail stinger, and missing swash plate drive link assembly, there is another part of the visual model that isn’t quite right. The rotor animation looks good as long as the collective is flat pitch, and there’s no cyclic displacement. However, add some cyclic movement in any direction, and things get a little weird. It’s sort of hard to explain, so I’ll let the screen shots do the talking.


So, as you can see from the screen shots, the tip path plane animation, doesn’t quite line up with the inboard portion of the rotor disk animation. This is most noticeable on the ground with large longitudinal cyclic inputs. Now it is important to note that this isn’t noticeable at all when flying in the virtual cockpit, so if you do the majority of your flying from the virtual cockpit like I do, this is pretty much a non-issue.
Sounds
Unlike the visual model, the sounds used for the Alabeo R66 don’t seem to have gotten the same attention to detail. That’s not to say they’re bad, but it seems that not as much effort went into producing a unique soundscape for the virtual cockpit, and external views. The only real difference I could detect between the two sound sets is the volume and the addition of the turbine exhaust sound in the external view, and a little bit of turbine spool up in the virtual cockpit view. Both sound sets resemble the Robinson series of helicopters reasonably well, it’s just that they are the same sound set. The cockpit sounds aren’t really all that convincing to me.
Systems
I’ve never flown the R66 in real life, but I do have some real world time in the R22 and R44 (not much though, I’m a Schweitzer/Hughes, MD kinda guy). The cockpit layout was very familiar; the only big differences were the lack of a manifold pressure gauge and other associated piston engine gauges. Instead we now have turbine engine specific gauges like torque, N1 and MGT. The dual tachometer has also been modified to show N2, instead of engine RPM. If you’re not sure what N2 is, that’s OK. As far as turbine powered helicopters are concerned, N2 is the speed of the power turbine section of the engine. Its most closely associated with rotor RPM, as the power turbine is what drives the helicopters transmission which in turn drives the rotor system. When an engine fails or the throttle is rolled to idle, the speed of N2 decays faster that the rotor RPM resulting in the needle split. I know most of you already know what N2 is, but I felt it was important to explain it for those who may not, because it’s going to be a key discussion point later on in the review.

The R22, and R44 aren’t known for their complexity, the R66 keeps that tradition. There is nothing complex about this aircraft. What the Alabeo R66 has in looks, it lacks in systems modeling, which to be fair sounds like an overly harsh criticism, especially after mentioning how mechanically simple the Robinson family of helicopters are. All off the basic things, like light switches, and battery switches seem to work, which is good, but as far as utility systems go, the Alabeo R66 falls behind its competitors in X-plane. Things like hydraulic switches are modeled, but aren’t clickable and have no effect on flight control. You can also pull the collective up into your armpit and keep it there only to find that the MGT will stay below 700 degrees Celsius which is below the maximum continuous MGT of 706 degrees for the Rolls-Royce 250-C300 that powers the R66. After reading the real Robinson R66 pilot operators handbook, I didn’t see any mention of automatic MGT limiting, so this collective/MGT modeling wasn’t realistic at all.
The biggest problem I had with systems modeling is the lack of throttle control. Like Nick found in the FSX version, I was unable to manipulate the throttle twist grip with my PFT Puma, or with my mouse in the Virtual cockpit. Looking at the real Robinson R66 Pilot Operating Handbook, there isn’t any throttle manipulation required for engine start like there is for the Hughes/MD 500 or the Bell 206 other than ensuring that the throttle is closed. The R66 starts more like a piston powered helicopter. But in this case, the starter button spins the engine compressor (N1) until 15%, and instead of introducing fuel via the throttle twist grip, the fuel cutoff is pushed to the ON position in an identical fashion to the fuel mixture control would be pushed to full rich in a piston powered helicopter. The fuel cutoff even looks like the fuel mixture control. I think Robinson did this to ease the transition from the R44 to the R66. Even though there’s no real role for the throttle twist grip during the R66’s engine start, it’s still required to bring the engine and rotor up to speed for flight in real life. The Alabeo R66 simply spools up the engine (very quickly I might add) to flight RPM for you which is both unrealistic, and alarming the first time you see it. It is puzzling that Alabeo wouldn’t model the throttle. It still plays a role in engine run up, and is central for all sorts of emergencies and emergency training; especially autorotations. This is the first payware helicopter I’ve ever seen for any platform, X-plane, or otherwise that didn’t have a throttle that can be manipulated with the users flight controls or Mouse. There is no way to set the Alabeo R66s engine to idle… or so I thought.
While in flight, at cruse or high hover, I lowered the collective in a similar manner to an autorotation, or in some cases while testing, I just set a low collective power setting. In either case the rotor RMP will climb as expected, but N2, will slow down as if I had rolled the throttle to idle. Again, I’ve never flown the R66, but I’ve never flown a real turbine helicopter where N2 behaved like this without throttle manipulation. It isn’t uncommon at all for rotor RPM needle to go past past the N2 needle during an autorotative decent. As a matter of fact, in some twin engine helicopters, having the rotor RPM above N2 is how autorotations are practiced when manipulation of the power levers or throttles is undesirable for training. It’s also not uncommon for N2 to temporarily slow down a little. As the engines’ governor senses the rotor RPM speeding up, it reduces fuel in order to prevent an overspeed. However, what is uncommon is to have N2 decay to that of the engine being at idle. I’m not sure, but perhaps this is Alabeo’s way of compensating for the lack of throttle control in their model. If this is the case, it was a bad idea. But, this did lead to some interesting things when evaluating the flight dynamics.
Flight Dynamics
As I said earlier in the review, I’ve never flown the R66, but I have flown its older slightly heavier brother the R44, so I’ve got a good idea of how this model should behave.
It’s important to note that this model comes with two, yes TWO, flight modes. One with artificial stability on, and one with artificial stability off. The control for this is conveniently accessible in the virtual cockpit by clicking on what is actually the quick release pin on the co-pilots side of the signature Robinson T-Bar style cyclic. If the pin is blue, the artificial stability is engaged, if it is red, the artificial stability is not.


As far as I know, there is only one approved aftermarket Stability Augmentation System available for the Robinson R66, but that particular system doesn’t seem to be modeled here as it requires the installation of the Garmin G500H, or the Aspen PFD Pro systems, which don’t appear on Alabeo’s model. So the majority of this flight evaluation was conducted with the artificial stability turned off.
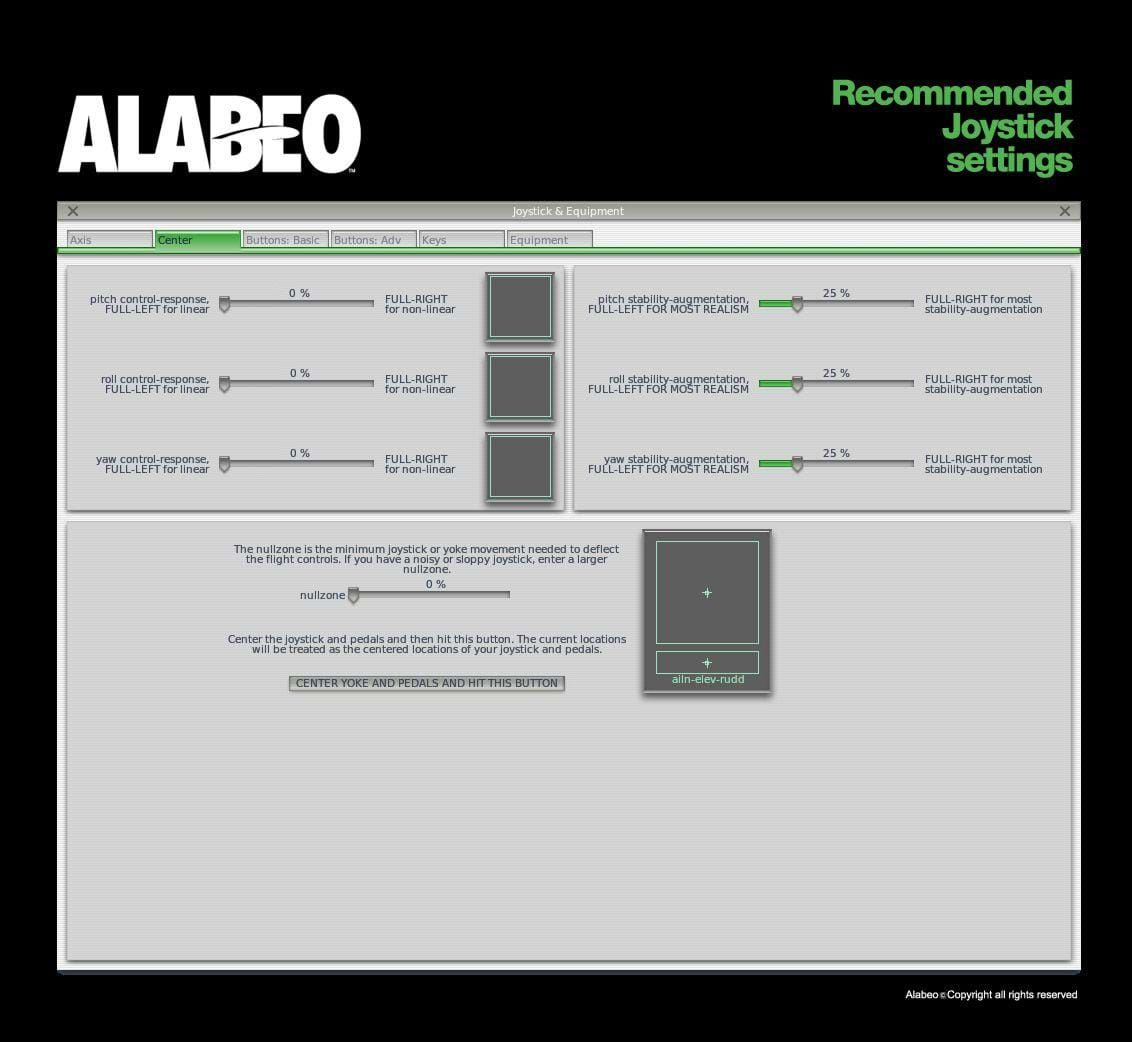
The Alabeo R66 comes with recommended flight control settings for X-plane 10, which were much different than what I normally use. Alabeo recommends 25% stability in the pitch, roll and yaw axis for their model. In order to fly it as the developer intended, my first flight with this model followed their recommendations.
Flying with the recommended settings from the developer makes this model fly like a much less modern helicopter, almost like a big Bell 47. It doesn’t really represent what I remember of the R44. It creates a lag in the control inputs that to me, was reminiscent of a FSX model. This lag also tends to create a sort of exaggerated pendulum effect that’s especially notable in the pitch axis at an IGE hover. This can lead to over controlling/over compensating for a more experienced simmer. If you’re an experienced helicopter simulator user I would recommend avoiding the suggested developer settings, and putting each stability axis back to 0%. At 0% I got a cyclic feel that was a little closer to the behavior of a Robinson helicopter that I remember.

At a hover, the flight model is pretty good, it’s not the best representation, but it’s reasonable for a light helicopter. I didn’t really feel like I was working as hard as I normally would to maintain a solid hover in light to moderate winds for a helicopter this size. In cruse flight, this model feels like an aircraft that weighs a lot more in regards to control response. I didn’t get the snappy flight control response that makes the Robinsons favorites of some pilots. But what I did get was more of a JetRanger/LongRanger type feel, which wasn’t bad, just a little bit different than what I would expect from a helicopter with a MGTOW of only 2,700lbs. The R66 is a light helicopter, even lighter than the R44, so I expected a bit more responsiveness in the cyclic, and collective inputs seemed to lag a bit. I found the pedal response to be pretty close to what I remember from the R44. Pedal input required hold the desired heading at a hover, and pedal required to maintain aircraft trim in cruse flight all seemed about right to me.




Earlier I mentioned the odd N2 drooping at low power settings. Well, this brought to light some interesting behavior that made judging this flight model very difficult. When I continued my flight testing of this model, I found that lowering the collective wasn’t really the only trigger for the N2 RPM to decay. It would seem like it’s more closely related to rotor RPM rising, which of course is exacerbated by low power settings on the collective. So, when the Rotor RPM starts to climb above what this model has set as normal, the N2 falls away. There were some realism issues I found with the conditions that would cause the rotor RPM to climb, but right now we’ll focus on the fact that it triggers a loss of N2.
When the user attempts to bring the rotor RPM back to normal, or attempts to arrest their decent by raising the collective, the Rotor RPM rapidly decays, which it should because there is no N2 to drive it. This leads to behavior that is very realistic in terms of an aircraft suffering from low rotor RPM, such as reduced tail rotor and cyclic authority, and increased rates of decent. Now here’s the problem, the low rotor RPM behavior is very realistic, however, the reason the aircraft gets into this situation (at least in my experience) is very unrealistic for a turbine powered helicopter. So how does one rate something that’s realistic but driven by something that, as far as I know, isn’t very realistic at all? Well, I suppose when it comes to assigning points to this flight model the two sort of cancel each other out.
After messing around with all of that, I decided to have a look at the artificial stability for this flight model. Clicking the quick release pin on the cyclic T-bar with your mouse will instantly add the automatic flight stabilization; this can even be done in flight if the user needs a little help getting out of some self-induced trouble. In my opinion, the artificial Stabilization should really be called Arcade mode. Because that’s essentially what it is. It was a little reminiscent of the old FS98 Bell 206 for those of you who can remember that far back. There is no torque effect modeling, and virtually no drift at a hover. Each flight control seems to operate independently of the others with no real correlation. The artificial stabilization pretty much acts like a sophisticated highly authoritative multi axis auto pilot.
For the experienced helicopter sim enthusiast, there is little use for the arcade mode. But, there is some potential use for the artificial stabilization function of this model for those who are brand new and just venturing into rotorcraft simulation. I think it would be a good way to introduce the very basics of the helicopters controls, and how they affect the aircraft. After this is a new user could turn off the artificial stability and then learn how the controls interact with each other.






