
Hello Philip thank you very much for your time and availability on doing this interview. I remember you started the project for the SA-315 Lama back in 2017. That’s quite a long time already. How did the project start? What’s the story behind the project? And why the Lama?
Hi Sérgio, well this is quite easy to answer: As a child I was very impressed by some rescue missions and a lot of slung load work I did see while doing our family vacation inside of the Swiss region Valais every year.
Since then, this Helicopter with its special turbine sound and unique look got a little place in my heart. I wanted to be able to fly one for myself since then. But this never happens. I did make a little German UL-SPL sport pilot license for little two‑seated airplanes, but never got the chance to sit in a real helicopter.
Then I learned about X‑Plane (version 9 back then) and did fly a lot with Nils BK117 and some of Brett Sumpter’s great helicopters. But I still wanted to see a good made Lama. After waiting for some years, I just didn’t want to wait any longer for someone else to do a Lama. So, I did start from scratch learning everything about the Lama and creating planes for X-Plane.
I really did start from zero that time. My goal was to release a little freeware Lama for X-Plane 10 those days…

The Lama isn’t exactly a complicated helicopter as it doesn’t have any overly complex systems (glass cockpit-style, or similar). One could almost say it’s a rather primitive model and people would expect such a model to take less time to produce. Why is it taking so long? Was it the lack of a visual model at first or it’s really just a matter of finding the time to do it? You are not doing this full-time, of course, and lack of time is a major issue for most developers I know.
The Lama is a very simple helicopter. Pilots do love her still today because of its easy systems and reliability. But if looking from a X-Plane developer perspective she isn’t very easy to do if you want to do her right.
Let’s first focus on systems and flight model: The Lama does not have a computer in it (she was invented in the 60-70 years) but she does have a lot of electro-mechanical switches and features. As example: like modern helicopters with FADEC the turbine of the Lama is controlled only via a single three-way starter switch and a throttle. Nothing more! So, you simple pull the throttle to idle, flip the starter-switch to START and everything goes automatic.
But because this is completely electro-mechanic there are some kind of safety switches build in. So, if the throttle is not in idle, the starter-switch logic gets disconnected from the electricity. As a safety feature it is not possible to start (or stop) the turbine if the throttle isn’t fully closed at idle position. Then the Lama does have a centrifugal clutch. This is not very common for helicopters this size (and sadly doesn’t even exist within X-Plane).
You need to throttle up the turbine to around 20.000 to 21.000 rpm to start closing the clutch and start turning the rotor system. As mentioned above, the Lama does have no FADEC, but it does have a simple rpm limiter built into the turbine. So, the Lama is only able to give as much power as you do open up the throttle but will reduce the fuel flow automatic (mechanically -> of course!) if rpm goes above 100%.
I wanted to not fake anything. So, I started to invent everything missing by plugin. First, I learned C++ (took me quite some time) and wrote a custom centrifugal clutch and a rpm limiter with the help of a real software developer for engine test benches in C++. This is done using as much default X-Plane mechanics as possible. So, I am using the default throttle input and my rpm limiter then reduces the throttle output to the turbine. For the clutch my plugin is working like a remote control controlling the default clutch within X-Plane. The user can fly the Lama just using default helicopter assignments within X-Plane (throttle, collective, yaw, pitch and roll). I was trying to get 100% compatibility with all setups out there. The beta phase will show, if I did miss or hit this goal.
Then I wanted to let the Lama behave just like the real thing. So, I started to tweak the flight model for years to get closer and closer to the original flight test reports I do have. But this really just was the start.
Because of Linux and Mac compatibility I did scratch the C++ plugin and started over again: now to learn and rewrite everything in X-Plane’s default xLua language. After winning Khamsin Studio as a partner for this project (with his unbelievable great models and textures) I noticed, I really had to include just everything to do justice to those great models. So, I got in contact with Air-Zermatt and some other Swiss pilots. They gave me the actual maintenance manual (1672 pages !!) and I could ask every question about the Lama. And finally, I really started to model every system you could use within X-Plane. There are only very few things I did model not:
- On the cabin floor there should be a little wheel to control cabin temperature heat. But you can’t feel this as a sim pilot, so we didn’t do it.
- Also like in modern cars power steering, the Lama does have a hydraulic system to reduce the needed force for the controls. But this system is as simple as in older cars and does nothing else. So, no force trim etc. But we can’t change the forces for the user controls at home and to include some sort of “delay” would just be very wrong because you still can fly the Lama by muscle memory without hydraulic. The control positions will stay the same! You just need more force to move them. So, we decided to not include this either.
- If there is a failure in the electro mechanical startup system the pilot is able to set the needed initial startup fuel depending on altitude (pressure) on a little valve with scale on the outside of the helicopter. If your system does not work right anymore you can step out of the Lama and set the needed startup fuel manually. We did not include this either.
- And finally, I did one little thing wrong by purpose: in reality you can test every single warning light by pressing this particular light down. It will be lit up. Also, there is a little “gauge test” button to test the fuel gauge warning light. To reduce click spots and additional plugin logic I decided to wire all warning lights to this “gauge test” button. So, in our X-Plane Lama pressing this test button will lit up all warning lights at once. We need just to pretend as if the owner did wire the test logic different after panel overhaul ;)
As far as I can remember, everything else is simulated like the real one.
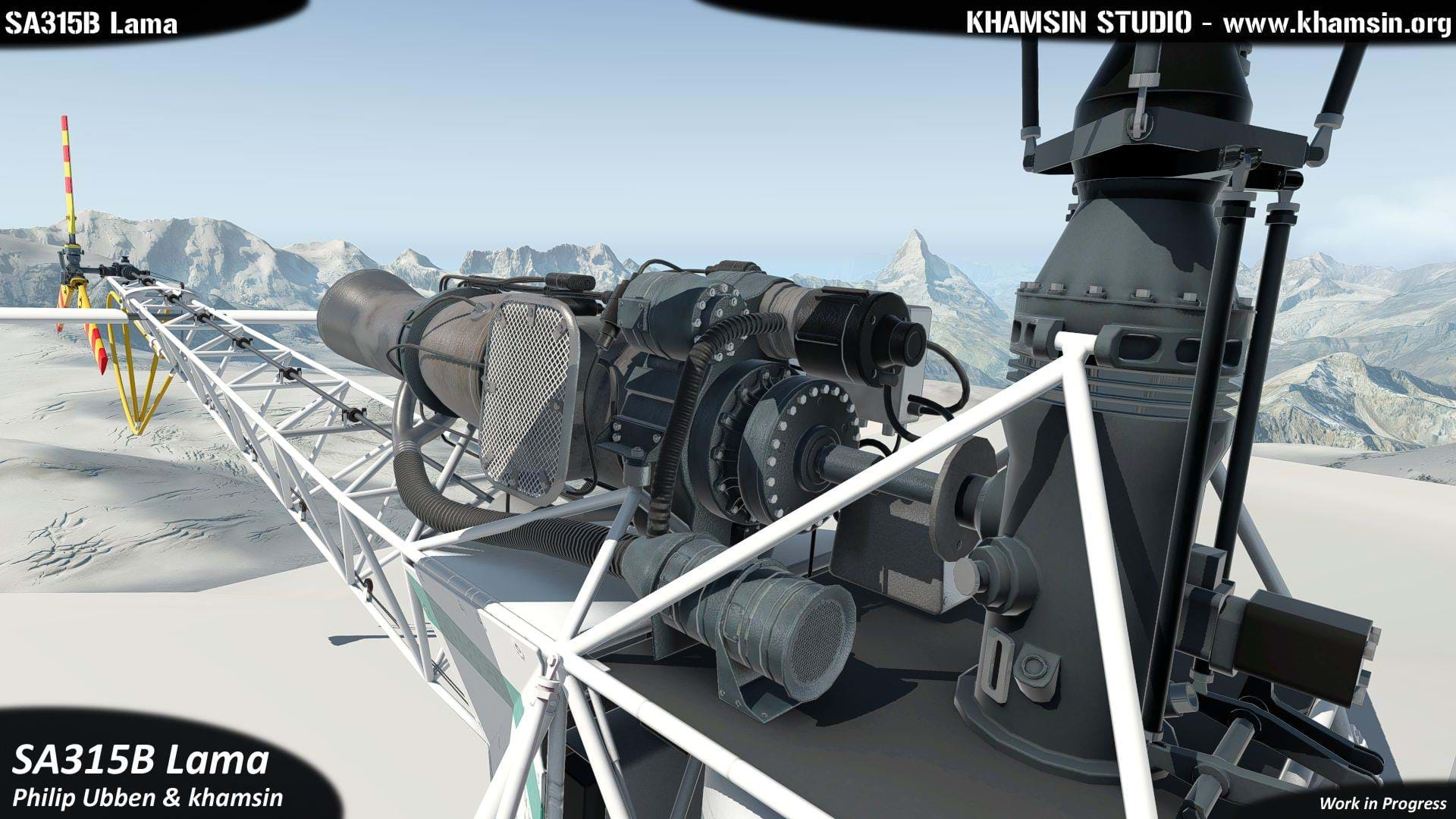
Now let’s look at the 3D-model: After starting the project Khamsin wrote me once in a slightly frustrated sidenote if I could please choose a helicopter with a real fuselage next time… The Lama is a simple helicopter. But to model this is even harder. You don’t have some nice body covering and hiding all the complex parts. You do just see everything! The engine is mounted free on top. All steering wires and tubes are free to see!
You do have this egg-shaped cabin with almost only glass around and you are able to see everything from every angle… The only things you don’t see are the connections from controls to steering tubes below the cabin floor and the hydraulic cylinders resting below the cabin floor. I don’t know the exact numbers, but Khamsin must have spent something around 1.000 working hours just for this model and textures jet. A Year does have 52 weeks. This means around 20 h of work per week! If you don’t take any vacation but leave the weekends free this means 4 h of work per business day for a whole year without any break! And yes, we are doing this in our spare time. So, you see: if we can only spend 1 h per day this automatically results in 4 years of development just for the model. And I must admit: I didn’t count my time at all… to do something right really just does take its time!
Wow, that is quite impressive and just shows how deceiving things can be. You don’t really understand how much work goes into such a “simple” helicopter until you hear the person that is actually doing it!
What’s the goal with the project? What is the place you want it to take in the X-Plane – and the helicopter – community? Are you aiming at something that could be considered more realistic on systems and less on flight dynamics, for example, and be used as a procedural sim or are you trying to make it a more well-rounded helicopter and offer as much as possible on all different areas of simulation – systems, flight dynamics, visuals, etc.?
I just want to do a complete simulation of the SA315B Lama! Visuals are not my first concern.
My goal is to make it fly just exactly as the real one and she should also “feel” exactly like the real one. And the systems should also be exactly as the real one. You know: I did start this project just for myself! I wanted to have a “real” Lama inside of X-Plane to realize my personal dream of flying such iconic machine.
My very first and most important goal is still to get the feeling and the numbers “as real as it gets”. Some weeks ago, a Swiss helicopter pilot did test my flight-model. While I was talking to him, I was watching his first minutes of lying with shared screen. He is flying the real HB-XII (one of the last two flying Lamas in Switzerland) every week because he is doing some parts of his commercial helicopter pilot license on that particular Lama but luckily, he also uses X‑Plane.
He took off, did a little pattern and tried the first autorotation. I was eager waiting for some input to finetune the flight model further. With the last two people who do have some Lama stick time, I wasn’t getting any further. But on this first flight he said, he could not find any differences to the real machine. He told me some very fine details did feel a tiny bit different but he couldn’t say if this is coming from my flight model or just from his input devices.
Of course, she feels different if sitting in front of your pc. But on first sight he told me there is nothing I should/could change. He is testing the flight model even longer now and he promised me to write a little review after spending some more time in it. I don’t have the complete review right now but he told me already about the nose dropping a bit too much if entering autorotation and pushing down the collective very fast. The real Lama seems more stable. Maybe I will look into this again… the change between downwash vs clean air onto the tail stabilizer seems to be a bit difficult in X-Plane.
Perhaps he’ll find some other little parts where we could improve some areas. But I think we are at such a high simulations level right now; you really need a lot of hours on the real thing to be able to spot tiny differences.

In this plan of yours, having Khamsin Studio joining you was crucial, of course. How did that happen? How did they approach you and, without mentioning the obvious which was the fact that they are bringing the visual part of the helicopter into the sim, what did it change in this process and the overall project by having them working with you?
Well… I do like the planes Khamsin Studio is doing. Starting with X-Plane 10 I was owning quite a few. Someday – just for fun – I did start to make some FMOD sound for his planes and showed those to Khamsin Studio. That was the first contact…
We do have quite different skills and seems match up to be a good development team covering all necessary parts for flyable X-Plane addons. And of course, this connection did change my goals quite a lot: In the first place I wanted to have a real feeling and flying Lama and some sort of basic “nice” model. I did invent the rpm limiter but was still using just the default X-Plane turbine startup procedures (starter to on, waiting for N1 to be around 14%, introducing fuel etc.).
In the beginning I was only interested in flying her. Not to do a procedural systems simulation. But after seeing the first renders from the cockpit Khamsin Studio was doing, I did notice for myself: wow this is just looking like the real thing. I need to do the real startup and shutdown also. And this was the start into the process of just do everything (minus the mentioned points above).
After real startup and shutdown, the unique collins-pitch-indicator followed next and so on and on. And after a commercial pilot from Air‑Zermatt told me how the turbine will drop slightly its idle rpm if switching off the booster‑pump: I just needed to add those little details also… (because of slightly dropping fuel pressure and everything being just mechanic the rpm will drop slightly at idle if the booster‑pump goes off and the mechanical turbine fuel pump has to do all work alone.
This is never done by pilots normally, but mechanics do this after fuel‑system service to check for the fuel flow and fuel pumps on ground run after service. You can do this now also in X-Plane)

You have been releasing quite some interesting videos and there are a few things that really pop-up when we watch them. Khamsin Studio’s 3D modeling quality is pretty obvious. You clearly see how much of a fantastic job they are doing. The other thing that I was really impressed was the sounds. And while not just the engine sounds (I have to say I love the sounds of “attaching” or “detaching” parts), that’s really something that almost gave me goose bumps. That engine sound, the sharp whining. It’s amazing! Where did you source those? Are you working with someone that is able to provide you with good quality sounds?
No, I don’t have had any chance to do my own high-quality recordings. I do live in Germany and the last two active flying Lamas nearby are located in Switzerland and are in daily use.
Also, in Italy there might some still be flying as far as I do know. And the last flying one in Austria was retired in December 2020. But luckily, I do have a background as recording engineer. Starting parallel to my university studies and after my university degree as a high school music teacher I was working in a recording studio for five years and did mostly do classical CD productions.
I still own a small portable recording studio at home and reactivated all the technical stuff to cut, edit and master sound snippets and samples which I did mostly find on good Lama videos out there. Then I got to learn all about FMOD and worked my way deep into it to get the best possible results out of my snippets and sound studio work done already.
But there are compromises I needed to do. Sadly, FMOD mixes stereo sound always a bit to mono, to be able to simulate some changing directional stereo effects. I would prefer if it would do this just by changing the volume for left and right channel, but it does this sadly with some mono mixing. This (to some degree mixed to mono) sound loses a lot of volumetric detail of its sound space and gets very flat.
So, I needed to work around of it. If you are in external view, I did disable the directional control completely within FMOD. Now you will always hear the Lama as if you are looking straight onto it. The distance simulation and physically sound changes are all there and do sound great but if you turn your view away from the Lama in external view the sound won’t change following your different view spot.
But I think this is a good compromise because normally the user is always looking straight at the Lama. And for this situation (all external views and flyby etc.) the sound is now just perfect mixed and processed and does keep its great deep stereo detail. You just should not use the static view and fly her out of your view… Maybe, because the Lama is such a loud helicopter, this might even not disturb the user: If in reality a Lama is flying nearby, you won’t have any “directional feeling” either. Just heavy pain in your ears (laughs).
You must also be working with people that are providing you with some material and insight on the Lama. How many pilots/experts are involved in the project?
Peter Salzgeber (the creator of the legendary FSX Lama and Alouette II) was doing the first test of my flight model inside of his simulator center and did even took a real flying hour in the HB-XRD together with another pilot and instructor to refresh memories and compare my flight model with the real thing.
Also, the chief of maintenance and a professional commercial Lama pilot – both from Air‑Zermatt – did helped me by sending documents and answered my questions per phone. Just to speak with such experienced pilots was a great help developing some details. There are also two guys building a real size Lama simulator in Switzerland out of a retired Lama (only turbine and main blades missing) using my flight model. And as mentioned above another pilot flying the real Lama weekly is testing the flight physics right now for me…
It has been quite interesting to see new teams or companies coming into the market with high quality products and jumping right into payware. I don’t think you had any previous serious experience with X-Plane before starting this project, did you? How did you decide to go full throttle on this and make it a commercial product from the start?
Do you know the X-Plane 11 Chipmunk from Khamsin? I did do the FMOD sound. This is already a payware product I was involved. Do you know the RotorSim EC135 and the upcoming H145 from XFER Design? I did the sound for both also.
The Lama was the first project I did start to develop by myself but I did practice a lot with different “side projects” alongside. With Khamsin Studio, I do also have a very experienced partner knowing the inside of the payware market. But until around one year ago the Lama still was just planned to be a little nice freeware project.
After going full throttle together with Khamsin Studio, we did raise the level in quality in such big steps, we also took the step to go payware. Otherwise, it would just not justify all the many hours we invested into this helicopter.
The overall quality of products is still raising every year. Just look at the EC135 or the Bell 429. The higher quality comes at a cost of way more work and time to invest. A lot of freeware developers are building bigger and bigger teams to be able to still handle those projects.
If five people are working on such projects and splitting tasks, like one doing only sound, the other the flight model, the next one the plugin code and the rest for objects and textures, then it might be possible to still handle this as a freeware project in spare time. But if you are alone or only two guys working on it and you start to remove some time from your “real money job” to be able to finish this within a reasonable amount of time, you really need to get paid off, at least a tiny bit…
Picking up on the previous question and on the quality of products by newcomers, do you think this high quality is possible because of the tools that are available to developers? Are these tools getting better? Are developers now able to access better information? Do you think something has changed for you guys that allows you to “do better” than you would do, let’s say, 10 years ago?
Yes of course it’s getting easier! But I think in the same amount of time the quality raises even more. So, in total you do need more time.
In X-Plane 10 without FMOD I did have also a nice sound for the Lama. Two startup sound files, two turbine sound files, maybe some rotor sound files too… That’s it! In a good hour you were able to finetune everything within audacity and got a nice sounding helicopter. These days I was spending weeks deep into FMOD to get my results.
You are able to chain a lot of mixing desks behind each other within FMOD if you are knowing what you do. This way you are able to mimic reality way closer. My turbine changes sound slightly depending on the amount of work it is doing, you are able to hear some additional flapping blending in and out following the real physics (so only if the following blade hits the turbulences from the leading blade), opening doors is letting outside sound into the cabin, removing the headset does change all sounds, we do have sounds (and vibrations) synced to the visual rotor blades, flying into the distance will reduce higher frequencies faster than lower frequencies (you do know the effect if there is a party somewhere in your neighborhood and you do only hear the bass?).
I was able to recreate this real behavior of sound in distance and much, much more (you should just sit cold and dark into some rain and listening -> I even wrote some custom rain sound blending over time.
So, if X-Plane’s weather system does an update and creates instantly some rain around you, the rain sound will now slowly blend in and increase in intensity…).
So yes: with the tools of today I think it would be possible to do a little nice addon from ten years ago within few days. But if every developer is trying to get the most possible quality out of X-Plane and using the available tools to its extremes to get there. I think the quality (and time needed) will increase with every new version of tools.

Is there anything that you’ve encountered so far in the project that really concerned you or made you delay it or even considering quitting? I don’t think this is a highly complex project on its own but from the value you have been added through the use of that tablet and the configurations, it looks like you had quite an amount of extra work to make it possible. Any road bumps?
Yes of course there where many, many road bumps. But luckily most of them where facing me at a time I was still aiming for a freeware project and just thought “let’s try it and if you don’t find a solution: so be it…”.
- First was learning C++ from scratch
- Then understanding the override throttle features and inventing a real rpm limiter within X-Plane by just using the default throttle axis.
- The centrifugal clutch was also a minor road bump for me
- After seeing Khamsin’s great cockpit recreating the complete automatic startup and shutdown logic with the unique Lama safety features and syncing it with all the warning lights was a big headache for me…
And finally, a very big road bump was going alongside the development for quite some time: X‑Plane does simulate everything by following forces. So, if the helicopter does weight 1.500 kg and is in a stable hover, the turbine is also creating the power to be able to hold those 1.500 kg steady. Now you should see this power on your torque gauge and so on… but on the Lama things are very different.
Everything is measured by pitch angles inside the Lama. You do have only a “pitch‑used” instrument (the collins pitch indicator) for power management. Inside all technical papers and flight manuals all numbers (speeds, lifting power, climb‑rate, autorotation rpm, etc.) is just given in pitch values.
And X-Plane is not doing a very good job here.
After tuning the airfoils and rotor values to get perfect autorotation rpm in all weight situations, I did face a big problem: If setting the pitch values correct for hover, she was climbing like a rocket in forward flight! Many times faster than the real one. But if I tuned the rotor to maintain exactly cruising and climbing numbers with given pitch values, she wasn’t even able to lift off!
So, there was a big discrepancy between hover and forward flight for given pitch values out of the manuals. She needed a way to high AOA for the main blades in hover situations.
Finally, I took the bitter pill and started to change the empty weight for the Lama “on the fly” via plugin to be able to match the right performances according to flight manual and the flight test protocols I do have.
Then I did the same for the drag of the fuselage itself. Because of all the little tubes, the Lama does have drag almost like a small parachute. I did not model all of this tubes within plane‑maker but started to finetune the drag via plugin depending on weight. Because of all this drag it is like flying against a wall if reaching the maximum speed.
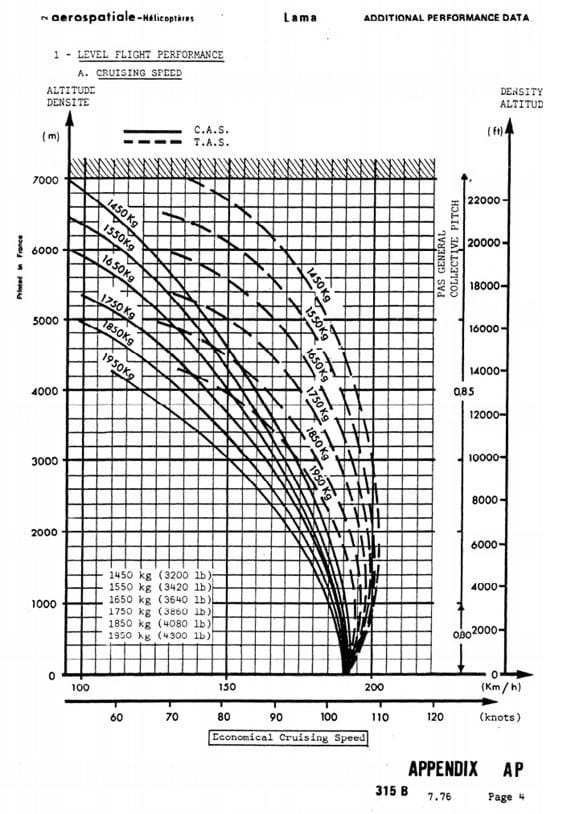
On the following little chart, you can see: at sea‑level it really doesn’t matter if she is flying with 1950 kg or only 1450 kg. At sea‑level, cruising speed is almost the same with 80% pulled pitch for all loading situations. X-Plane wasn’t able to recreate this either without all these draggy tubes modelled. So, I am changing the drag per plugin also for all weight situations.
To be honest, I do fear some of Austin Meyers “bazillions of flight‑model improvements” for XP12. But as long as I do only need to change some little numbers inside my plugin, I am very confident she will also be able to behave “as reals as it gets” within XP12. But if he does change again some starter behavior or clutch behavior, he might break my custom startup sequences…
So, at this point she will be X-Plane 11 only!! (But you can be assured, I will try to make her as perfect within XP12 when it will become available. I do want to be able to fly her also in the next versions of XP for myself ;))
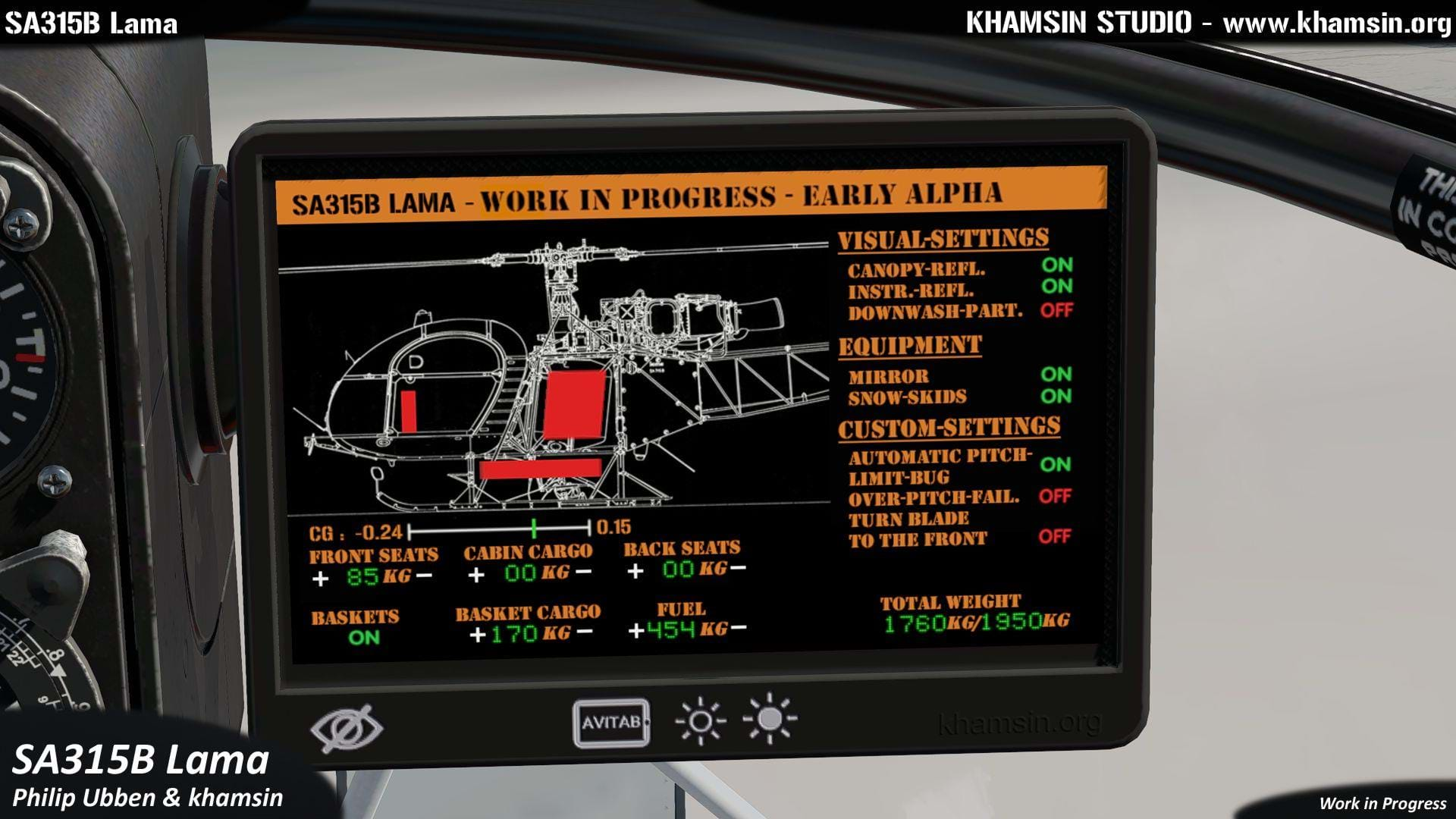
You did mention the tablet: this is just a 2D cockpit texture and some gauges done in plane‑maker (laughs…). But on the tablet, you can see a bit behind the curtain. My plugin overwrites the complete load and weight menu including the center of gravity which gets updated every physics cycle. And of course, attaching the baskets will change drag and weight instantly. Also, there are some custom features which are toggle able: the fps hungry downwash particle effect, to let a helping hand turn one blade up front for you, toggle some visual effects like reflections etc.…
At first these custom features where only accessible via custom commands the plugin introduces into X-Plane (you can bind all this stuff to buttons or keyboard if you want to) but I wanted to have some visual feedback and accessibility for the user. So, I did ask Khamsin Studio if we could use the tablet out of the Chipmunk to make most of this stuff toggleable via mouse.
There are still additional things working but hidden. I did implement some “overpitching” failure for users who do like get punished if doing something wrong. If enabled and going way over the allowed pitch limit you will get ugly metal bending and rattling noises, the rpm will drop, the turbine will produce grey to black smoke and the cockpit gets heavily shaken.
But after talking with real pilots, they told me how unrealistic this is. In reality the overpowered turbine takes any overpitching with ease. You won’t feel any vibrations or whatsoever. If you are lucky, you will notice nothing. If you’re not so lucky, you will find some metal chips inside the transmission oil and need an expensive overhaul and if very unlucky you will suddenly lose your transmission in flight.
So, I just did disable this. The command to enable is still there and a user can toggle this on and off via key if he wants to get some “punishment”…
This is a question I get a lot myself when people ask me about your project – and let me tell you that I get a few questions every now and then, so you did get people’s attention. How far into development are you? Is it something you can say? If you had to give it a percentage, how much of the work is done? From what I have seen, it looks like the majority is there. If I had to guess I would say 85% of the work or even more than that is done. But I know the last 10% is usually the hardest!
Well, this is really a hard question for someone doing his first complete project. Way more than ones in the past I was thinking, we are at around 95% done. But every time there where bad surprises around the corner.
About new problems I never have had thought of or about new features that came up while developing etc.… The real question should go more into the direction of “when do you pull the trigger and consider this as finished”. There are always more details you could implement! Thinking of it that way: we would never be finished. For example: the hole tube construction is filled up with nitrogen gas.
Then there are a few probes (called video‑pi) attached to the tube frame. As soon as there will be a little crack into the airframe, normal air will enter the tubes and the probes will change color as a warning… <- shall we do such stuff also ( you can see one of those probes in this article )?
But it looks like we did pull the feature line already. At this moment there are only the cockpit vibration animations missing and some minor texture tweaks to be done. After this, we need to start the Beta testing phase and also refine and redo some parts of the manuals shipping with the product. We are doing these in French, English and German so this might also take some time.

Of course, I have to ask: any estimated date of release yet? A ballpark? Q3 2021? Q4? 2022?
No, there really is no estimated date. All dates I would have told you until now are in the past. Funny, isn’t it? Whenever you might have asked me this question in the past, I would have thought the Lama should be released long time ago already.
I have learned through other projects from different developers you should never give any dates! Maybe the beta testing is done in a few days because we are incredible guys and there are just no bugs in (just kiddinng)? Maybe there is a really bad showstopper on Linux or Mac, and I need to rewrite major parts of plugin taking several months? (I do hope this is also: “just kidding” but who knows…)
Just to be clear: the “easy and simple” Lama does contain a plugin of 2.621 lines of code filled with 104.037 characters right now to get everything working (and I did not count the handwritten light objects into this which I need for my plugin-controlled spill and landing lights to dim together with voltage drop).
So, if a testing phase shows some serious problems, I really can’t say how much delay this will be for us. I simply don’t know by myself how long all this might take…
I know it’s too soon to ask as you haven’t even released the Lama but do you see yourself continue to develop other projects in the future? Is it something you’d like to eventually pursue?
Yes, I will include my knowledge and skills into some other projects (but all planes and no helicopters planned right now). But because I am not the lead developer for those projects, I won’t talk about those.

Well, thank you very much once again for your time and for answering our question, Philip. Is there anything else you’d like to add?
For all those people out there, who want to have plane X or helicopter Y: Just start doing those by yourself!
This is a great journey; you will learn a ton of new stuff and if you really reach your own goals this might also not be a big relieve but also a big satisfaction! But as a hint: choose a plane/helicopter you really do love by heart! Otherwise, chances are too big to fail and drop development if facing first problems…
Note by the author: easy projects are never that. They are never easy. All development ends up being hard and what seems to be a “simple” aircraft, rarely is. I am very grateful that Philip went through the small details on his answers that really demonstrate this. One of the goals of this interview was not only for all of us to learn more about this project but also to try and understand the complexity of this project, which ends up being the complexity of other projects as well.
It’s impossible not to respect the hard work of those that spend countless hours working on something for us to appreciate and spend our time having fun.
Thank you, Philip, for the amazing interview.






