Some of you know this, and some don’t, but my day job is as an AH-64 pilot for the United States Army.
I’ve been flying the 64 since 2005 and being an Instructor Pilot for the AH-64 since 2013. I wouldn’t call myself an expert on the AH-64. Anyone who says they are is most likely lying to you, or themselves. But I do have a bit of experience with the airframe.
This isn’t a full review, not in the same sense that I’ve examined other models. There are a few reasons for this, one of the biggest being that this is an early access model, so it’s still in its infancy. It wouldn’t be fair to the developer to pick it apart and point out all the things that are wrong when it’s incomplete.
Whether or not selling an incomplete module is a good thing is something that almost always sparks a discussion on message boards and online forums. But that’s not what I’m getting into. Eagle Dynamics has always been very open about what you’re getting when you pay for pre-release products.
The second reason is that there are quite a few things about the AH-64 that I don’t discuss in public. That being said, none of the things I’m leaving out of this look, and future evaluations of this model will prevent the home user from enjoying this DCS module.
Method for Testing
The AH-64D is a very unique helicopter. There really isn’t another aircraft like it in the world. Some helicopters are designed for the same or similar missions, but none of them do it like the AH-64, nor are any of them equipped like an AH-64.
It’s also a two-pilot aircraft with two distinct crew stations that have specific duties. Even though many of those overlap, they’re still very different and require specific training for each. So, when evaluating this model, I used multi-crew with another qualified RL1 AH64 PIC. Each Apache pilot I tested this model with had 200-1800hrs in a D model Apache, but no less than 1500 hours total time.
I did this to create the best environment possible to evaluate the model, catch things I may not have noticed, and confirm things that I saw. At no point did I use the AI as a crew member when evaluating the aircraft in a mission scenario and won’t cover the AI crew member in my reviews.
I also actively take in observations from other qualified AH-64 pilots who’re playing with this model. Not all of these observations are going to make it into this article. And this is an early access model, so I’m not going to pick it apart too badly.
Visual Model
The 3D modeling of this module is pretty spot on. You would have to look really closely to find something wrong with it. This is definitely an older 64D that’s modeled here. However, it’s kind of hard to pin down what version of AH-64D this actually represents.
It’s a mash-up of different D models at different stages of upgrades, or equipment divestment assuming this is a U.S. Army AH-64, which looking at the external and cockpit models, it absolutely is. These discrepancies are likely because the external model isn’t finished or because the developer didn’t base the model on a specific time period of the AH-64 D and used references that spanned over 15 years. Whoever was working on it didn’t understand the upgrade/divestment timeline or these are systems that Eagle Dynamics doesn’t plan to implement.
But again, these are very small discrepancies. For the most part, this model is very similar to the ones I flew between 2007 and 2009. Some current real-world AH-64 pilots probably wouldn’t notice them unless they flew this aircraft prior to 2010. Are these things going to stop anyone from enjoying this model?
Nope.



The cockpit model is REALLY good!
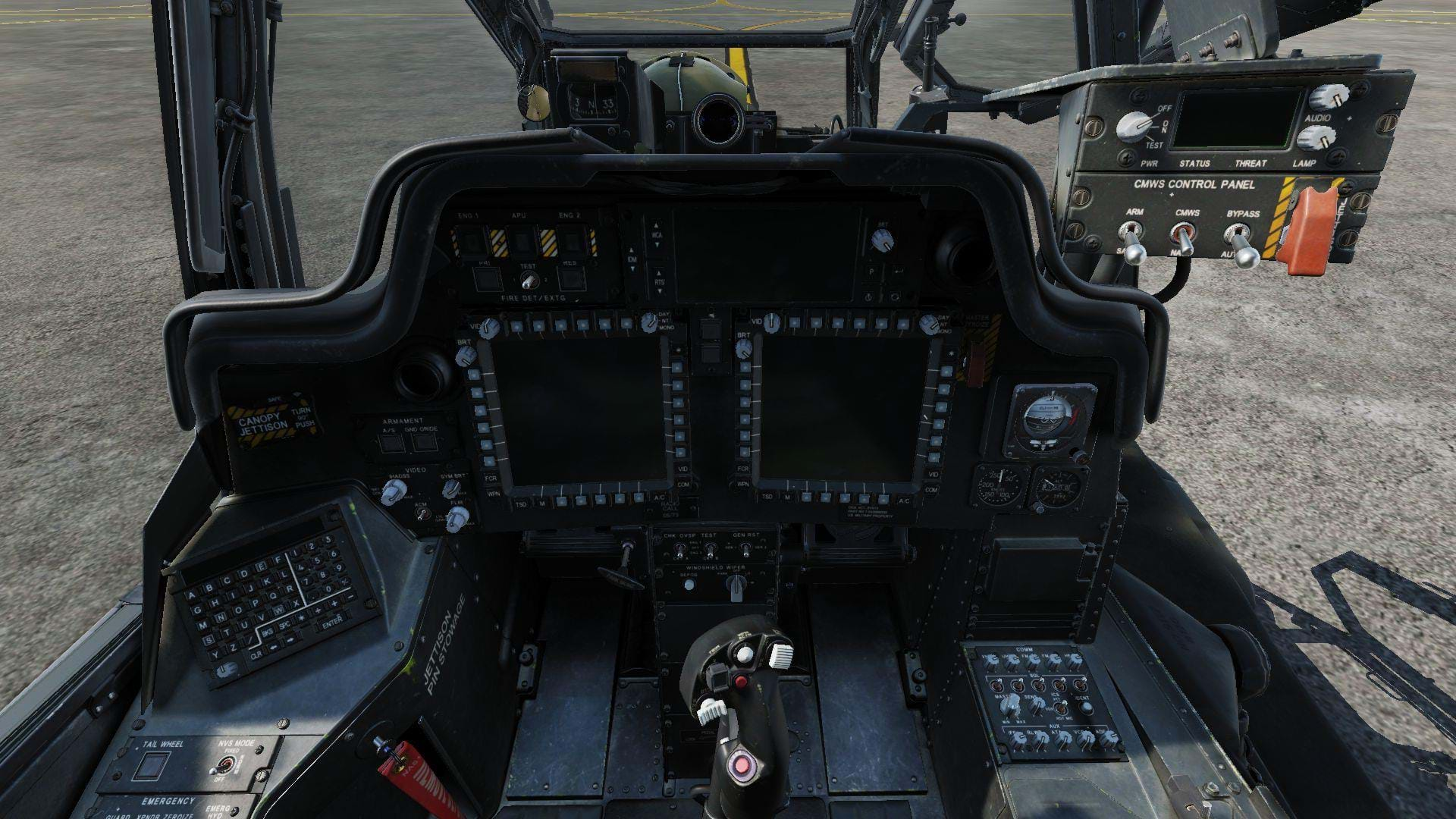

Sitting in this model in VR felt right at home. It was all very well done. The back seat seems to be more refined than the front crew station, but even then, it’s still really good.
I give them lots of credit for the way they did the HDU (Helmet Display Unit). In VR it’s really convincing, so much so that I habitually tried to reach up and adjust it. The sizing of the symbology in the HDU however is a little too small. This isn’t a big deal for flight simmers, but in the actual aircraft, this could be an issue when flying at night.
While there are controls that enable you to make adjustments via the DAP, you can’t adjust them properly. In addition to that, The CPG HDU symbology when using NVS is inaccurately identical to that of the Pilots Station. Not a big deal for most DCS users, but it’s something that stood out to me.
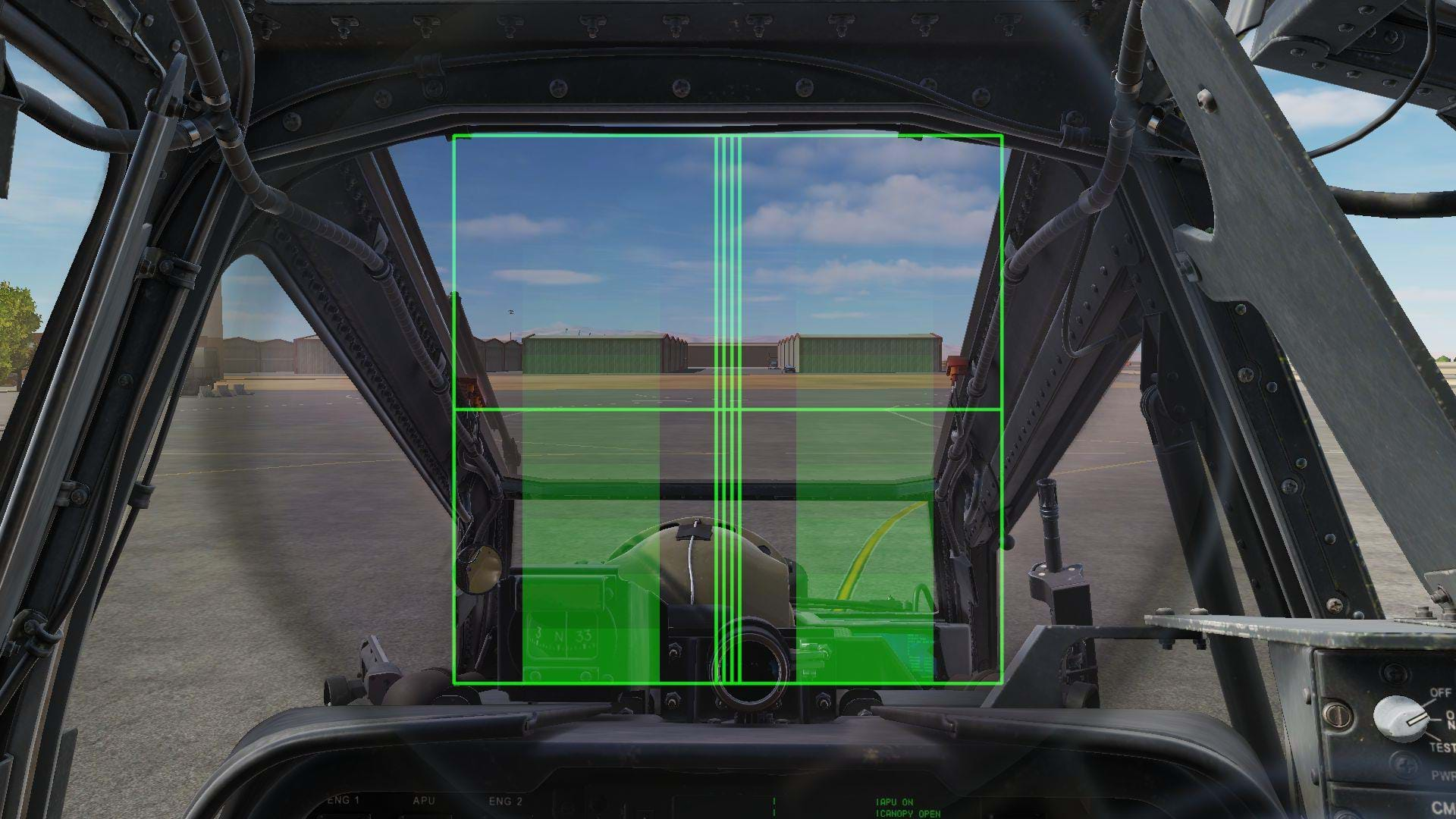
Speaking of the HDU, there’s another glaring issue that springs up when doing the Helmet Boresight. For those of you who don’t know. Helmet Boresight is when both crew members align their Integrated Helmet Unit with the aircraft, but more importantly, they are letting the aircraft understand where their heads are.
The Apache is famous for its helmet tracking system, which allows it unparalleled night fighting ability, as well as the ability to aim, fire, and hit targets by simply looking at them. To do this, the aircraft systems need a reference point for where the pilots’ helmets are in the cockpit.
This would be much easier if every Apache pilot was the exact same height and of the exact same proportions, but we’re not. So Bore sighting tells the aircraft what adjustments it needs to make to ensure that the weapons and sensors are looking at the same place as the Pilot.
The Boresight Reticle Unit in the DCS Apache is… well… wrong. While the BRU itself is modeled very well, when it activates to boresight the HDU, the boresight rings that are there are nothing like I’ve ever seen.
They’re the wrong color and move around when the pilot moves their heads. It’s really weird to me. Not a big deal to a DCS player, but a misinterpretation of how the BRU works and looks.

If I have one complaint about the visual model it’s the main rotor, particularly when at 101% NR. The blur at the rotor hub is just too much. It’s just a smeared mess. The rotor animation when the rotor is idle is just fine and should carry over when the power levers are at “fly”. Ironically, this is how it was for most of the promotional material, and it looked great, I’m not sure why they changed it.

Sounds
The sounds are pretty much spot on, clearly recorded from an actual aircraft or taken from an LPT. I have very few notes for the soundscape ED created for this model.
Systems
I’m not going to get too nitpicky about the systems modeling here. It is early access, and not a complete module.
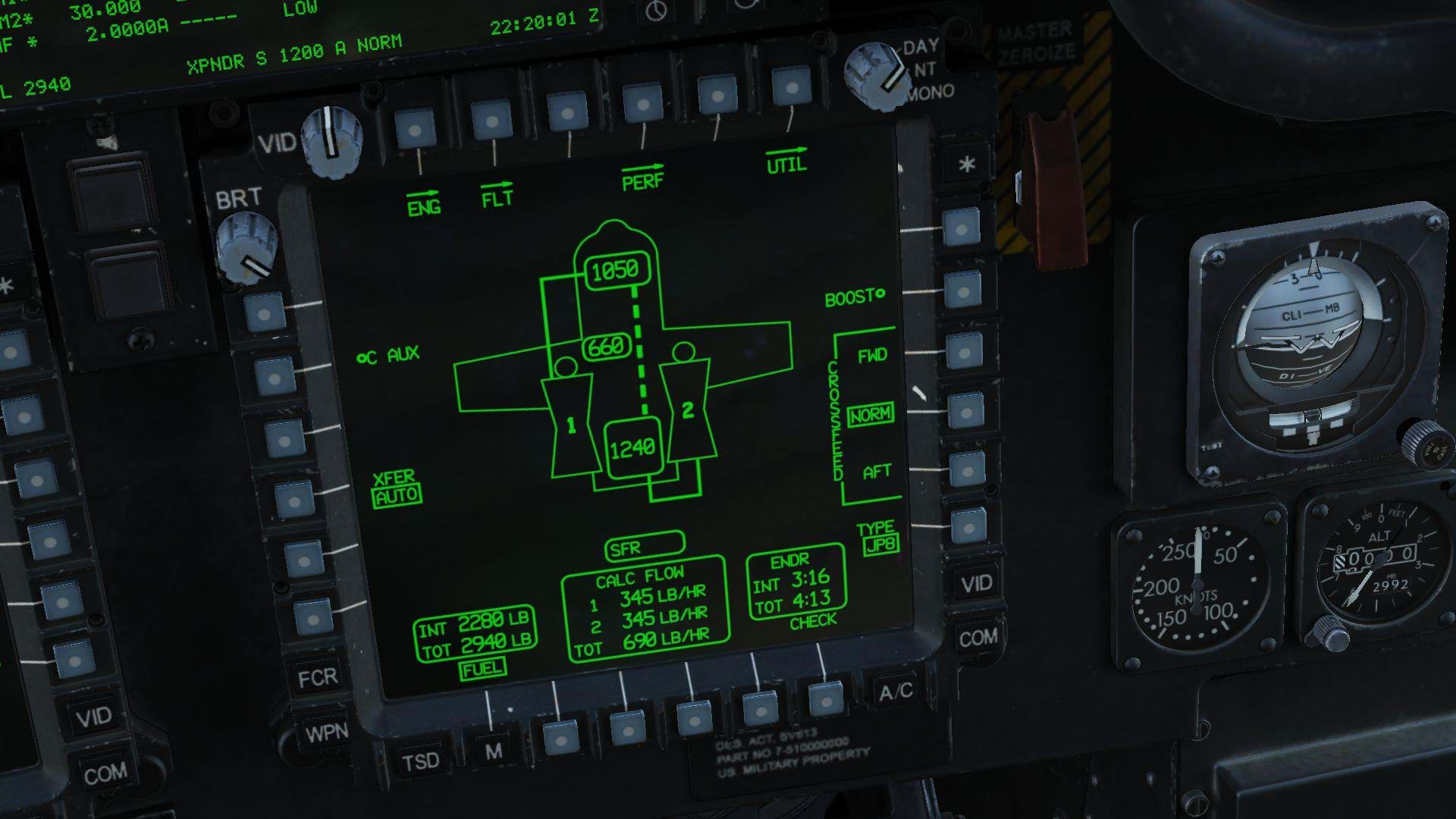
So, it’s really hard to know what may be just incomplete as opposed to inaccurate. So far, the systems modeling is VERY basic. When looking at the MPDs (yes, it’s MPD, Multi-Purpose Display, not MFD, that’s not a typo) they’re all pretty much surface-level options.
Just the basics. More than enough to get in and go shoot things, but a lot is missing on most of these pages. The Eagle Dynamics AH-64 seems to be based on a very old software version; one I haven’t seen in well over a decade. A lot has changed since I flew this software version. It has a few similarities to what’s flying around today but not enough to be a good trainer for the actual aircraft.
Starting this model from cold and dark is deceptively simple. This model is really only scratching the surface of what it actually takes to wake a 64D up and get it ready to fight.
While Eagle Dynamics has given us enough to go out and shoot things, it’s not all of the things that go into operating an AH-64. The Com page is probably the biggest example of a commonly used page that is very underdeveloped at this stage of the release. The weapons page is OK so far, and the TSD page seems to be coming along very well, while other pages just simply aren’t available.
The Fuel system has some quirks. The biggest quirk I’ve seen is the automatic fuel transfer system showing that it’s transferring fuel to the forward cell that’s already full.
The ice detector system seems to be buggy. It just cycles through the three levels of Icing regardless of whether you are in icing conditions or not.

UPDATE: this segment was updated on September 24, 2022.
One of the biggest issues I’ve seen with the system modeling is the PNVS. In addition to the BRU and HDU symbology sizing issue, the PNVS doesn't follow the pilot's head the way it does in the actual aircraft.
In the DCS Apache, the PNVS points exactly where the HDU line of sight is looking, which is fine when you’re looking straight ahead. But when looking past the centerline, particularly at what should be the left and right gimbal limits, the DCS Apache PNVS seems to compensate for the parallax between the crew station, and the position of the sensor.
The PNVS is mounted at the tip of the nose of the helicopter. The head of the pilot, in the aft crew station, is about 12 feet behind, and roughly 3 feet above the sensor depending on the pilot's sitting height and vertical seat adjustment. So, when the pilot looks 89 degrees to their right using the PNVS as a sensor, they should see in their right eye what is directly in front of the sensor.
But, instead, you see what is directly in front of the pilot. You should be looking at the world from the sensor's perspective, but in the DCS model, you’re still looking at it from the Pilot’s perspective as if you’re wearing NVGs which is inaccurate.
In DCS, the PNVS seems to rotate past its designed limits to point at whatever the pilot is looking at when looking to the far left or far right.
I did some additional testing, prior to updating to the set beta version of DCS and I did indeed find the parallax. Looking back on the testing that I did, the objects I looked at were not close enough to reasonably determine if this effect was present. So I took another look, and was pleased to see that I was wrong! Parallax is present!

The hold modes and FMC on this model aren’t quite there yet. Another issue is the constant SAS Saturated advisory on the EUFD. This advisory only ever comes on when the hold modes are used for too long and the SAS needs to be reset. This is easy to do, and only takes about 3 seconds. But in the DCS model, the SAS saturates even without the use of the hold modes.
Taking the engine start switch to override does some weird stuff. TGT rises, and when you take the switch back to off, Ng hangs at around 20% which would suggest a hang start.
The list goes on and on, but again, this is early access, so some bugs in the system are to be expected.
One thing that isn’t a bug ( I don’t think) is the front seat cyclic. It folds and extends just like the real helicopter does, but, this is tied to aircraft control. What I mean is that in the sim when the front seat requests\takes the flight controls, the cyclic extends. When control goes to the back seat, the cyclic stows again. This gives the erroneous impression that the pilot in the front seat will stow the cyclic when he’s not flying, and only extend it when it’s his or her turn to fly. In reality the front seat cyclic is extended during run up before the blade are spinning, and it stays in the extended position for the duration of the flight.
Edit end
The hold modes and FMC on this model aren’t quite there yet. Another issue is the constant SAS Saturated advisory on the EUFD. This advisory only ever comes on when the hold modes are used for too long and the SAS needs to be reset. This is easy to do and only takes about 3 seconds. But in the DCS model, the SAS saturates even without the use of the hold modes.
Taking the engine start switch to override does some weird stuff. TGT rises, and when you take the switch back to off, Ng hangs at around 20% which would suggest a hung start.
The list goes on and on, but again, this is early access, so some bugs in the system are to be expected.
One thing that I don’t think is a bug in the front seat cyclic. It folds and extends just like the real helicopter does but this is tied to aircraft control. What I mean is that in the sim when the front seat requests\takes the flight controls, the cyclic extends. When control goes to the back seat, the cyclic stows again. This gives the erroneous impression that the pilot in the front seat will stow the cyclic when he’s not flying, and only extend it when it’s his or her turn to fly.
In reality, the front seat cyclic is extended during the run-up before the blades are spinning, and it stays in the extended position for the duration of the flight.


Weapons
Most of the weapons systems have come a long way since this model was released. Initially, the gun was really bugged, with rounds simply disappearing at 2.9 kilometers. There were also some inaccurate safety and performance inhibits on the gun at its max ballistic range.


The missile models here are of only one type so far, and that’s the AGM 114K. The K (Kilo) was a popular missile during my time, particularly the K2A variant. But the K model has largely fallen out of favor in the U.S. Army. So far, the performance of the Kilos in DCS is pretty good, it doesn’t always fly the proper trajectory, but again, not something most DCS users would know or care about.
Flight Dynamics
This is probably the hardest model I’ve ever tried to review as far as flight dynamics are concerned. As a matter of fact, this has changed the way I look at flight modeling in home use hobby-grade flight simulators.
For this test, I used a brand-new Pro Flight Trainer Puma X2 with toe brakes. I have the cyclic set to where a normal AH-64 cyclic would be. The collective and pedals are as close as they can be.
When I first tried this model, I found it almost impossible to fly.
It rolled over almost immediately shredding the rotor blades. This was the day after a flight in a real Apache, so I’m certain I didn’t forget how to fly them in the 18 hours or so between real flight and sim.
The cyclic was way too responsive, almost to the point of being sporadic. The pedals we equally over-sensitive during ground taxi, and all collective input seemed to be exaggerated as well. Nothing about this flight model resembled anything I’d ever flown, not to mention the helicopter I’d flown the day prior.
So, I started working with some curves. I set all of my primary control axes to 25% at first. This brought the handling at a hover closer to what I would expect, but then basic/combat maneuvering and cruise flight were incredibly laggy, almost like a Bell 47 or Hiller H-12.
I stopped, recalibrated in windows, set the curves back to zero, and tried again. Still uncontrollable. At this point I thought maybe there was something wrong with my flight controls, so I recalibrated again, this time looking at raw data to be sure there wasn’t anything else working against me. The controls checked out just fine, and a quick flight in X-Plane, followed by a Mi-24 and UH-1 flight in DCS confirmed that my hardware was functioning properly. So, what gives?
One thing I noticed that made a HUGE difference was the settings in the Special tab of the Options menu.
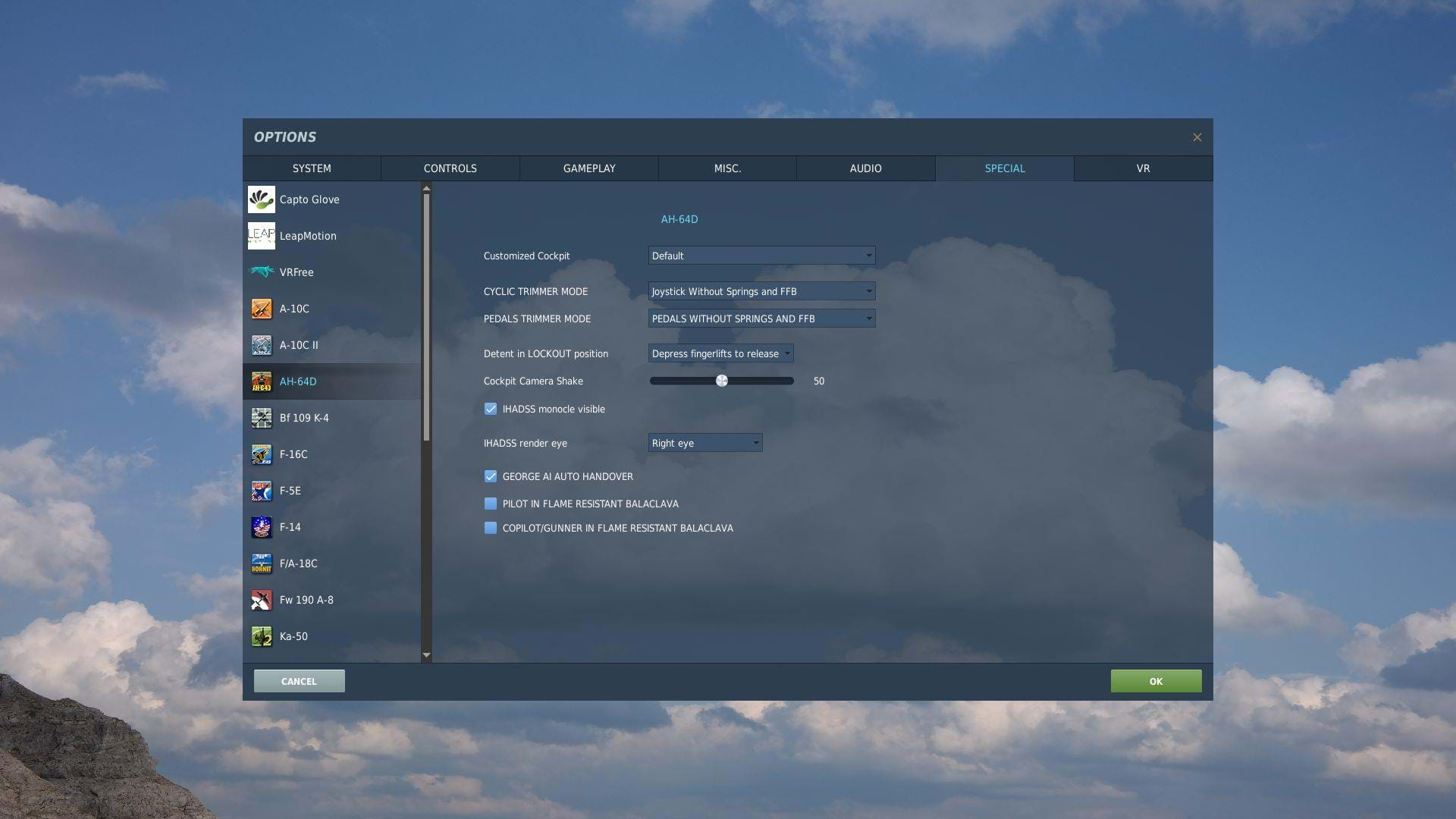
Changing the CYCLIC TRIMMER MODE selection to Joystick without springs and FFB made a big difference, the same with the Pedal trimmer mode. But it still wasn’t quite right.
I tinkered with the curves some more and ended up with the collective curve at 20%, and pedals at 15%. The cyclic is still a challenge because with the trimmer mode now set, I was able to bring the curves back to zero and the model is flyable. Even though it feels much better at a hover but is still not quite right. It’s just fine at cruise or maneuvering flight but at a hover my normal cyclic inputs that I would make in a real aircraft results in lots of over-controlling. So far, I haven’t been able to find a setting that gives me both realistic hover handing and maneuvering flight characteristics.



This model also seems to develop rates of descent very quickly, not vortex ring state (more on that in a minute) but at a hover, this model behaves like it weighs far more than it actually does despite what the torque setting is.
Now, to give credit where credit is due, this model is the first helicopter for DCS that doesn’t slip into Vortex Ring State if you look at it wrong.
The ease with which DCS models enter into VRS is terribly unrealistic. This is compounded by the fact that now some simmers who don’t quite understand VRS or have never experienced it in real life now believe this is a realism benchmark and it's one of the things that makes DCS helicopters so good. I assure you It is not.
I’m thrilled to say the DCS Apache breaks that trend! But part of what makes this model so frustrating for me is that when I pull what I feel is a normal collective input to arrest that rate, it easily goes to a power setting that’s well into the TGT limiter setting and the rotor rpm starts to bleed off rapidly.
One of the people who had a hand in developing the flight model for the DCS Apache reached out to me to discuss it. I didn’t know he was a part of this project until then, but I’ve known this person from outside of the simulation community, and he knows a lot about the AH-64.
Over the course of two days, we discussed the flight model, and why we experienced it so differently. One of the things that stuck out the most was the hardware used to develop and tune the flight model. The equipment he used was similar to most fixed-wing setups rather than that of a helicopter, which makes sense. The vast majority of DCS users use it to fly jets. So, tuning the flight model to what they have is catering to their primary demographic.
Now, compare this to some of my favorite models built for X-plane. DreamFoil Creations were developed with a full set of helicopter controls. I don’t know what controls the Nimbus creators used, I know that at least two of their testers who provided feedback on the flight model were using a full set of flight controls, the same with CowanSim.
So, does it make a difference? I’m not sure, but I’m starting to see evidence that it might. I don’t have nearly enough data to make that determination, but it’s certainly my leading theory.
Conclusion
Is this a super realistic Apache flight simulator? No, no it isn't. Is it the best representation of an AH-64D since Janes Longbow 2? Yes! It absolutely is.
This is a fun model to play with, especially multi-crew. I didn’t expect it to be a perfect replication of an AH-64, especially at this stage. Even when it’s complete, there are going to be some shortcomings but that’s OK. I’m keeping my eye on this model because I suspect that a few years from now when I’m retired from the army, this will help me a lot when I’m feeling nostalgic.
Given that this is still an early access model, it still has a ways to go. I’m curious to see how far Eagle Dynamics will take this model. Once this model is out of early access, we’ll give it another look and see just how close Eagle Dynamics got to the real thing.
Editor’s note: we have decided not to give any ratings to the DCS AH-64D Apache yet, considering it’s an early-access product.






